OBJECT 19 TODO1 작성을 통한 compoiste, visitor패턴 학습
object 책을 강의한 코드스핏츠 유튜브 요약
📜 제목으로 보기
- 디자인패턴 심화 - 컴포짓 + 비지터 패턴
- 프레임웤과 제어 역전
- 컴포짓패턴: 파일탐색기에서 파일이름으로 검색
- TODO 실습(컴포짓패턴)
- task와 tasks(파일 -> 폴더안에 파일들 구성)
- 파일과 폴더를 합친 composite객체(CompositeTask) 와 파일+폴더정보를 묶어서 출력할 사본Composite객체(TaskReport)만들기
- Main에서 Composite객체 및 출력사본 CompositeReport객체 사용하기
- Renderer: 순회의 제어구조 -> Visitor패턴으로 프레임웤 만들기
- ConsoleVisitor: 제어구조에 끼워넣을 제어실행visitor 구상체1
- Main에서 render + consolevisitor로 visitor.taskDraw() 출력 확인하기
- task -> 내부에서 TaskReport만들때부터 정렬방식이 전해져야한다.
- JsonVisitor: depth를 가진 출력은 json형태라서 만들 수 있다
- Main에서 사용
- 프레임웤은 visitor패턴과 템플릿메소드패턴으로 구성된다.
- 참고 유튜브 : https://www.youtube.com/watch?v=navJTjZlUGk
- 정리본: https://github.com/LenKIM/object-book
- 코드: https://github.com/eternity-oop/object
- 책(목차) : https://wikibook.co.kr/object/
디자인패턴 심화 - 컴포짓 + 비지터 패턴
프레임웤과 제어 역전
- 책 15장에 관한 내용을 정리한다.
- 이 책의 비밀은 디자인 패턴 중에
전략패턴, 템플릿메소드패턴, 데코레이터패턴을 써서 적용하는 것이었다.- 데코레이터 패턴 -> 핸드폰 요금 계산
- 전략<->템플릿 -> 무비씨어터
-
우리는 프레임웤에다가제어의역전으로 인해기능만 공급해주고,언제 실행될지는라이프사이클이 가지고 있는 프레임웤이 결정한다. - 프레임웤과 라이브러리의 차이는?
- 프레임웤 : 제어의 역전이 되어있는 것
- 우리의 코드가 프로세스 제어구문을 가지고 있냐 안가지고 있냐
- 우리 코드에 제어구문이 없다면? -> 바깥에 있는 것. 나는 visitor로서 라이프싸이클 메서드를 흐름대로 구현하는 중.
- 우리는 제어구문이 소비할 함수와 객체만 만드는 것
- 예를 들면, for문은 바깥에서 주어짐 -> 우리는 for문에 쓸 함수만 만듦
- 그렇다면, 우리는 프레임웤을 쓴다면, 함수를 건네주는 것 밖에 할 수 없다.
- for라는 프레임웤을 만들었다고 가정하자. 우리는 객체만 만들어서 넣어준다.
- 이 객체는 initialze, loop, end, 3개의 메서드를 만들라고 프레임웤으로 부터 강제 받는다.
-
프레임웤은 제어를 하는데
- 프레임웤이 받은 객체의 initialize메서드를 호출
- 프레임웤이 for반복문을 돌리되, 받은 객체의 loop메서드를 호출
- 프레임웤이 객체의 end메서드를 호출
-
우리의 코드에는
for반복문이 없어졌고,라이프사이클에 맞춘 행동(순서대로 호출)도 없어졌다.- 우리는, 프레임웤이 제어구문을 미리 짜놓고, 거기에 맞춘 객체(메서드)만 전달해준다.
-
제어의 역전은, 하나의 역할(인터페이스)만 역전시키지 않고, 보통
제어의 흐름대로 역전을 시키기 때문에,프레임웤은 내부에 라이프사이클을 가지고 있게 된다.- 스프링을 예를 들면, 우리는 컨트롤러를 만들지만, 스프링 프레임웤은 내부에 라이프사이클인 interceptor를 만들면 before-controller-after를 라이프사이클 순서대로 가지고 있다.
- my) 처음부터 코드를 짠다면, 라이프사이클 코드는 그대로 작성해두고, 바뀌는 기능부분만 제어역전시켜 밖으로 빼준다?!
-
우리는 프레임웤에다가제어의역전으로 인해기능만 공급해주고,언제 실행될지는라이프사이클이 가지고 있는 프레임웤이 결정한다.- my)
프레임웤의 제어의역전: 제어는 프레임웤이 미리 라이프사이클 순서대로 짜놓아서 우리가 못짜는 역전 현상이 발생하고, 우리는 흐름대로의 역할(기능, 메서드 by객체)만 공급해주니, 우리가 공급한 기능의 호출, 실행 타이밍은 프레임웤에 결정되어있다.
- my)
- 우리의 코드가 프로세스 제어구문을 가지고 있냐 안가지고 있냐
-
라이브러리: 제어의역전이 아니므로, 기능을 우리가 언제든 호출할 수 있다.
- 프레임웤은 기능을 공급만하고, 호출은 프레임웤이 제어해놓은 순서대로 결정해서 호출하게한다
- 함수로서 오직 값의 획득만 위임할 수 있다. 조작해서 뭔가를 하는 프로세스는 위임할 수 없다.
- 프레임웤 : 제어의 역전이 되어있는 것
-
우리의 코드도 프레임웤화 되어있어야한다.
- 제일 어려운 부분은 알고리즘이다. 우리는 엑셀의 피벗테이블을 바로 짤 수 없다.
- 2단 for인 것은 알고 있으나, 복잡한 상태와 제어가 관여되고, 분기가 심하다
- 우리는 1개의 분기를 제거할때마다 전략패턴을 썼었다
- 2단 for인 것은 알고 있으나, 복잡한 상태와 제어가 관여되고, 분기가 심하다
- 제어가 없는 알고리즘은 없으니 필수적인데, 제어는 1개만 만들고, 나머지는 제어의 혜택을 받게 만들자.
- 우리는 라이브러리를 만들어서는, 제어를 위임할 수 없다.
- 함수로서 오직 값의 획득만 위임할 수 있다. 조작해서 뭔가를 하는 프로세스는 위임할 수 없다.
- 제일 어려운 부분은 알고리즘이다. 우리는 엑셀의 피벗테이블을 바로 짤 수 없다.
- 제어에 대해서 익숙해질려면 코드 연습을 통해서 할 수 밖에 없다.
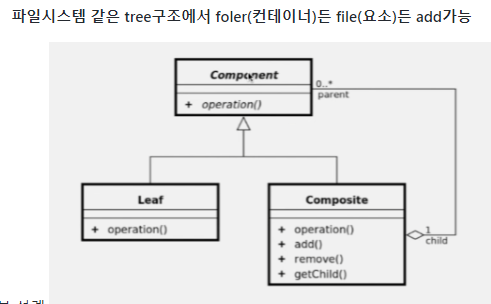
컴포짓패턴: 파일탐색기에서 파일이름으로 검색
-
전략패턴과 데코레이터패턴을 짬뽕한
컴포지트 패턴이 책에 소개된다.-
영화라는 검색키워드를 아래 트리형태의 구조에 어떻게 다 던질까- 폴더1
- 파일1
- 파일2
- 폴더2
- 폴더1
-
파일도, 폴더도 검색기능을 제공해야하니
파일과 폴더 모두 searchText()라는 메소드를 공통으로 가지고 있어야한다파일이라면 돌면서,빈 배열에 자기가 해당하면 자신을 담아준다.-
하지만
폴더라면, 자기자신이외에자식들까지 순회하면서 해당하면 다 담아줘야한다- 폴더자신도 재귀적으로 돈다
- 폴더의 폴더도 재귀로 돈다
- 여기서 핵심은, 폴더든 파일이든 모두
searchText()메소드를 공통으로 구현했다는것이다
-
-
NoDiscountpolicy를 만들 때, 빈값리턴하는 특이한 클래스를 만들지말고, 아예 discountpolicy를top에서부터 상속받지만, discount가 안되는 클래스를 만들어보자 할 때,다른 policy들은 discountpolicy를 상속하는 전략객체이나policy전체를 커버하는 애로 바껴서 leaf계열 tree계열로 바뀌게 된다.- 혹시… 할인 전략객체들 vs 노할인 단일객체를 포괄하는 정책으로 바꾼다는 소리인가?
- 일단 참고 깃허브
패턴을 배우는 순서
- 패턴을 배우는 순서
- 상속 -> 좋은 상속의 템플릿메소드패턴
- 조합폭발방지 -> 전략패턴
- 전략패턴의 전략패턴 -> 어댑터 패턴
- 전략객체가 많이 나오다보면, 단일요소 객체 vs 컬렉션 객체를 포괄하는 -> 컴포짓패턴
- element vs collection -> 컴포짓 패턴
- 컴포짓 패턴의 loop를 외부에 위임 -> visitor패턴
- element간에 연결 by linkedlist -> 데코레이터 패턴
- 중간에 멈출 수 없는 한번에 쭉 가는 for문을 써야한다는 문제점 -> 책임사슬 패턴
- 나머지들 -> 끝판왕 커맨드 패턴
- 지연실행에 대한 일이라 어렵다
- 해야하는 일을 함수에 담아서 -> 객체로 만들고 -> 모았다가 -> 실행or역카운터실행
- 1패턴 -> 1객체가 아니라 1객체가 여러가지 패턴을 소유할 수 있음.
- 분산되어있는 컴포짓패턴 -> 다음장에 바로 컴포짓패턴의 3가지 역할을 다 수행하는 컴포짓패턴을 소개함.
- 디자인패턴의 다이어그램은, 객체의 역할이지 객체가 아니다.
- 다이어그램 갯수만큼 객체가 나오지 않는다.
- 역할별로 1개의 객체로 연습
- 이후 모든 역할을 1개의 객체에 몰빵하는 연습
- 전략객체이자 실행객체
- 전략객체이자 상태객체
- 전략객체 소유하는 객체를 상태객체로 만들기
TODO 실습(컴포짓패턴)
task와 tasks(파일 -> 폴더안에 파일들 구성)
-
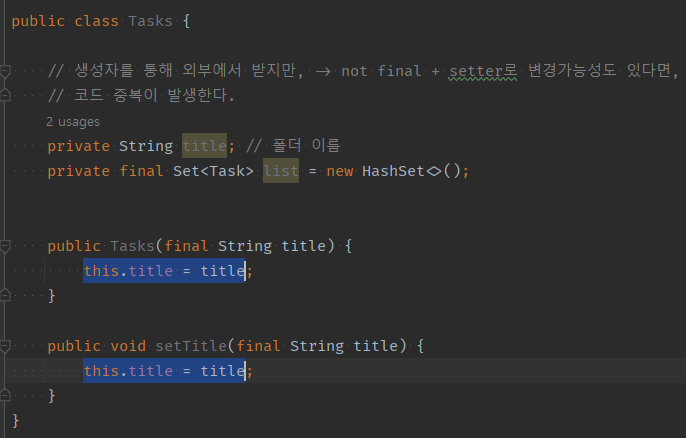
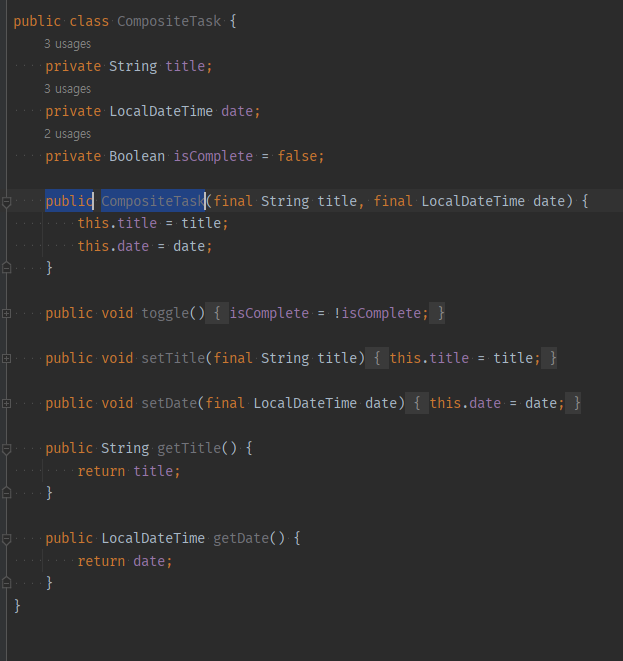
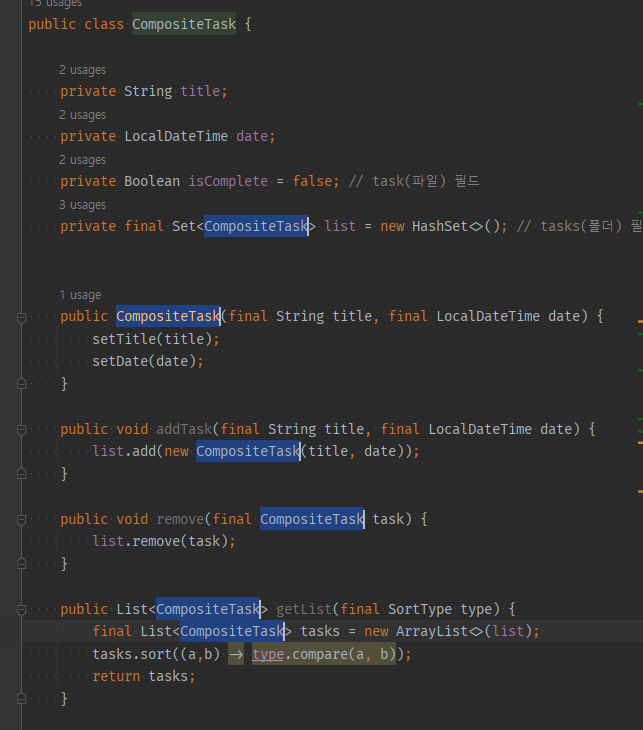
taks(할일) 클래스를 만든다.
- 기본적으로 title / date (localdatetime) / isComplete(boolean)를 가져야한다.
- 새로만들어지면 항상 false상태여야하므로, false로 필드 초기화해서 만든다.
- 나머지(title, date)만 생성자에서 받는다.
-
코드를 짤 때,
기본값이 있는 것들은 생성자에서 받으면 안된다. 그렇단 얘기는,기본값 -> 외부에서 받는 정책과는 구분된다.- 코드의 의도를 잘 읽어내야한다.
- title과 date는 생성자에서 외부로 받는 정책인데, 왜 final을 안쓸까?
중간에 바뀌는 필드라는 의도
- 기본적으로 title / date (localdatetime) / isComplete(boolean)를 가져야한다.
-
taks라는 어떤 모델을 만들 때,
상태 변화하는 필드(not final)에 대한 메서드(setter, 그외)를 만들어 행위를 제약하고, 필드는내부에서 알아서 처리되도록 캡슐화를 해야한다.- 대표적으로 todo앱에서는 check를 켰다껐다 밖에 안되므로
isComplete에는 setter를 주면 안된다.외부에서 임의의 값을 받아 상태를 업데이트(저장 복원 등)setter를 주면 안된다.
-
my)
boolean으로 제약이 걸린 필드의 받아업데이트는void setter(값)가 아니라 파라미터 없는 void toggle이다.- void setter(파라미터) 대신
제약걸린 받아 저장은 void(받기용!) toggle() 인자가 없이 제약걸린 뒤집기만 함
- void setter(파라미터) 대신
- 객체는 자신의 상태를 자기가 관리한다는 개념 state management의 책임
- 그외의 변하는 필드(not final)에는 setter를 만든다.
- 대표적으로 todo앱에서는 check를 켰다껐다 밖에 안되므로
-
Task는 1개의 데이터객체일 뿐이며, Task를 담을 그릇이 필요하다-
일급컬렉션 느낌으로
Tasks를 만든다. -
하지만, 폴더의 개념으로서 폴더도 이름도 필요하다
-
tasks폴더도 title을 가지게 된다.
- 기본값x -> 필드초기화x -> 생성자에서 외부에서 받지만, 변경가능한 not final -> setter가 생긴다 ->
외부(생성자)에서 받고, 변하기도 하는(setter) 필드는생성자에서 재할당 코드를 setter로 덮어 코드중복을 없앤다
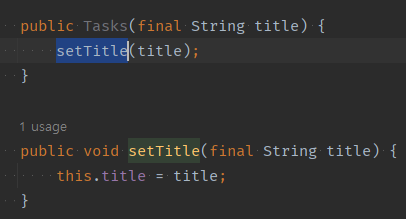
- 기본값x -> 필드초기화x -> 생성자에서 외부에서 받지만, 변경가능한 not final -> setter가 생긴다 ->
-
setter로 title이 들어올 때, 내부에서 데코레이터 글자색정하기+태그달기 등을 할 수 있다.
- 그 과정을 생성자에서 받을 때도 반영하기 위해서는 setter로 코드중복을 제거한다.
-
-
최초 생성자에서 받고 + 그 다음에 변경되는 필드값은
setter와 생성자에서의 코드 중복을 제거해야한다. 많은 회사에서 이것때문에 문제가 발행한다.- setter할때랑, 최초 생성할때랑 로직이 달라져서
-
-
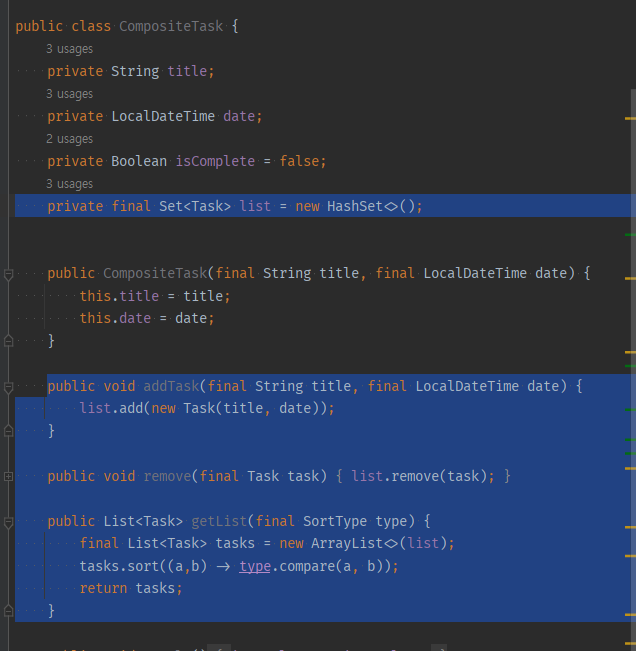
task들을 가지기 위해 Set컬렉션 필드를 가진다. 이 필드 역시
상태 변화 필드에 대한 메서드로 제약 + 캡슐화인setter(받아 업데이트 기능)을 만들어줘야한다.- 컬렉션필드는 변경가능성 없는 것으로보고 즉시 final을 걸어놓자.
-
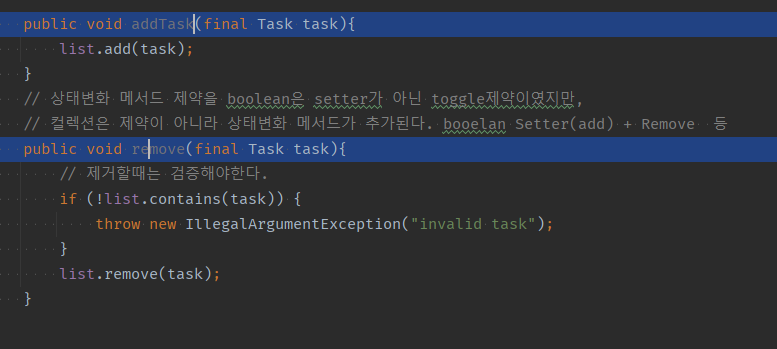
컬렉션은 void setter대신
boolean addXXX()로 만들어야한다.- 지금은 귀찮으니 void add로 만든다.
-
**이 때,
setter/add의 인자 결정으로 2가지 판단할 수 있다. **
-
데이터객체task를 받는 메서드가 public인데, 외부에서
바깥에서 생성된 task=외부에 task의 생성자를 공개(내부발행X)=바깥에서 마음대로 task를 만들 수 있어를 받을 것인지를.. -
우리는 바깥에서 task를 만들어야할지 말아야할지는 잘 모르겠으나,
task를 바깥에서 만들 수 있게 푸는 순간(public 받기 메서드에서 인자로 들어오는 순간) -> task의 생성자를 함부로 못 고치게 된다.- 받기 메서드의 인자로 데이터객체를 받는다 = 외부에서 생성된다 = task생성자를 수정할 때, 외부의 모든코드도 수정해야한다 = 상당한 비용을 치루고 task를 수정할 수 있다.
-
프로젝트 초창기부터
수정에 대한 비용이 많이 드는 것을 방지하려면어쩔수 없이 외부에 task를 공개하는 시점직전까진 외부의 task를 인자로 받는 것을 미뤄두고->task생성 필수정보만 받아서 내부발행(생성)하도록 한다.-
일단 setter의 인자를 객체가 아닌 객체생성에 필요한 정보를 받도록 수정한다.

-
Taks의 생성자를 public -> 폴더인 Tasks와 같은 패키지에위치할 것이므로 internal로 수정한다.
-
필요에 의해 외부에 task가 생성되어야하면, 그때 공개한다.
-
-
Task객체의 생성을 관리폴더 Tasks내부에서 하게되면수정의 여파가, 내부발행처인 Tasks에만 미친다. -
public class의
public객체지만,생성자는 public이 아닌 것은 당연한 것이라고 생각해야한다.- 왠만하면 아니여야 정상이다.
바깥쪽에서 new키워드쓰는 객체는 최소화하는 것이 최고다
-
remove는 add(setter)와 다르다.-
받을 때는,
없는 객체에 대해 외부 생성을 최대한 피하고, [같은 package에 존재하며, 그 객체의 추가를 관리하는 폴더]가 필요정보만 받고, 내부발행하여 -> 수정 비용을 줄이는 것이 반영되지만, -
삭제는
이미 기존에 생성되어 존재하는 객체며,public class의 public 객체로서외부에 이미 존재하게 된다. -
이미 존재해야지만 -> 메서드 인자로 들어와 -> 지워진다.- 삭제시 존재유무 검사를 안해도 된다.
-
원시형으로 지우는 것이 더 웃기게 된다.
-
Set -> 객체는 메모리주소 = 값x = 객체 = id로 식별로 식별되며, 삭제시에는
이미 존재하는 public객체이므로, 인자로 받아도 된다 -
add는
생성자를 외부에 감추기 위해 원시형으로 받았지만, remove는지울때는 반듯이 객체를 통해 지워야한다. 값으로는 객체 식별이 안되기 때문이다.- 값이 주어지면, 같은 title을 가지는 다른 객체가 지워질 수도 있다(unique보장이 안된 필드이므로)
-
지우는 것은 이미 바깥에서 존재하는 객체를 지우는 것이다. 내부 정보를 가지고 발행하는 정보전문가의 상황이 아니더라도,컬렉션으로 관리하는 데이터객체를받는 메서드를 정의할 때,일단은 필요정보만 인자로 받고, 내부발행으로 시작하여,외부에서생성로직의 수정시 드는 비용을 절감하기 위해 내부발행으로 시작한다.
-
-
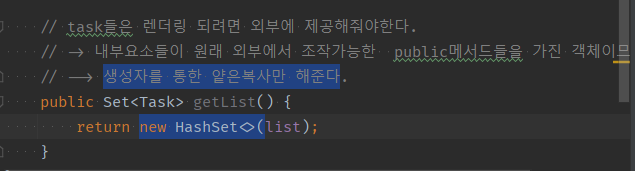
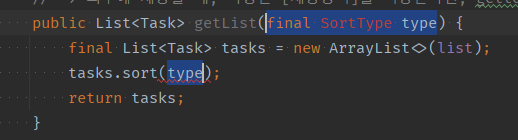
tasks만 가지고 있는 task set을 외부에 getter로 공개해야지만, 렌더링이 될 수 있을 것이다.
- 이 때, 컬렉션을 외부에 제공할 때는,
우리가 짜는 코드는 메모리 걱정을 안해도 되니, 사본정책을 쓴다 -
컬렉션은 외부에 주면
외부 조작가능성이 있다.- 누군가 반드시 한다고 생각한다.
-
원시값이 아닌 이상
컬렉션 뿐만 아니라 객체필드 역시 사본으로 제공해줘야한다.- 객체를 주면,
외부에서 객체메서드를 통해, 객체의 상태를 조작할 가능성이 있다. -
컬렉션을 주면,컬렉션의 메서드로 통해 순서나 요소들을 조작할 수 있다- Set의 add/remove를 막을 수 있는 방법은 없다
- 객체를 주면,
-
이 때도 2가지 판단을 할 수 있다.
-
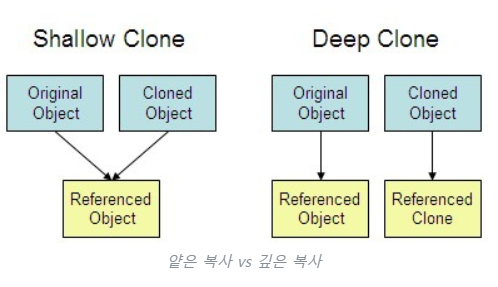
사본 중에도
깊은 복사/얕은 복사둘중에 뭐를 해줄지 어떻게 판단할까?-
반환되는 객체/컬렉션에 대해 [원래 객체의 메서드들이 public으로 외부에 공개되어있던 놈이라면] -> 얕은 복사를 해준다.- 원래 task객체는,
외부에서 조작할 수 있는 public을 가지는 놈이라서 얕은복사를 해준다.
- public은 원래 외부에서 조작하는 것이 허가된 메서드
- 원래 task객체는,
-
만약, task객체가 외부에서 조작불가능한 메서드를 가지고 있었다면 -> [외부에서 조작하는 것이 겁나므로] -> [깊은 복사]를 해주면 된다.
-
-
따라서,
컬렉션이라도 내부 객체 task는 원래 외부조작 가능하니컬렉션을 깊은 복사할 필요없다. 얕은 복사만해주면 된다.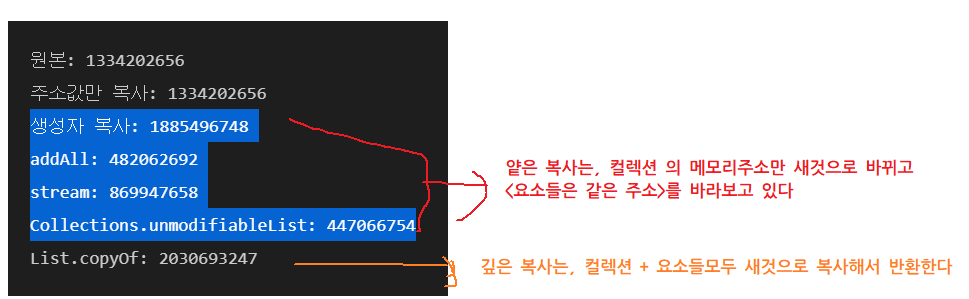
-
Tasks의 상태인 컬렉션 필드는 건들이면 안되니 무조건 사본을 줘야하는데-
외부에서 컬렉션사본을 받았지만, 그 사본과 내부컬렉션 필드 속
요소는 여전히 연결될 수 있다내부 상태와 연결된 요소들은 외부에서 조작해도 상관없다면,얕은복사연결된 내부 요소들을 조작해선 안된다면, 깊은 복사를 내어준다.
-
외부에서 컬렉션사본을 받았지만, 그 사본과 내부컬렉션 필드 속
- 이 때, 컬렉션을 외부에 제공할 때는,
-
task의 제공은
순서를 가진 set이 아닌 list로 반환해줘야한다.-
task는 date순서대로 오름/내림차순 되어야하므로
Set으로 식별한 객체들이지만, 외부에 제공은 List로해준다.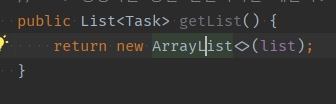
-
-
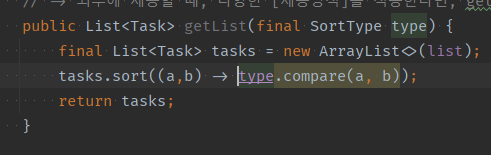
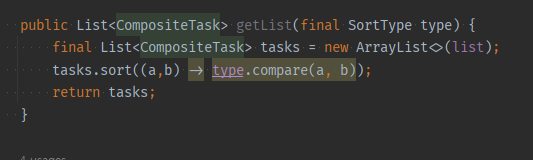
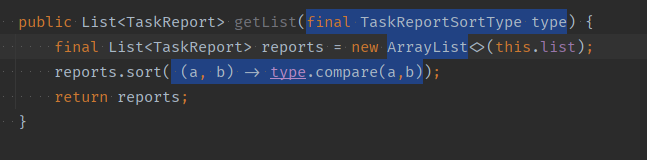
내부관리 Set대신 순서적용이 가능한 list를 반환한다면,미리 sort도 해주고 반환한다.- 보통은 정렬까지해서 반환한다.
-
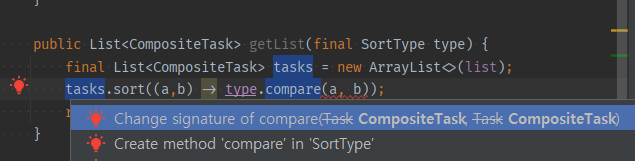
이 때, 정렬을 바로 오름차순으로 하지말고,
public외부 제공getter해줄 때, [정렬방법]과 같은 [제공방식을 인자]로 외부에서 받아서 제공해준다- 객체지향에서 메세지는 객체로 받으므로
정렬type도 객체 파라미터로 받는다. - 객체지향에서 처리는
값type의 객체이므로정렬type객체는제한된 종류의 값type을 정의하는 enum일 것이며,값으로 췩브해서 처리될 것이다.
- 객체지향에서 메세지는 객체로 받으므로
-
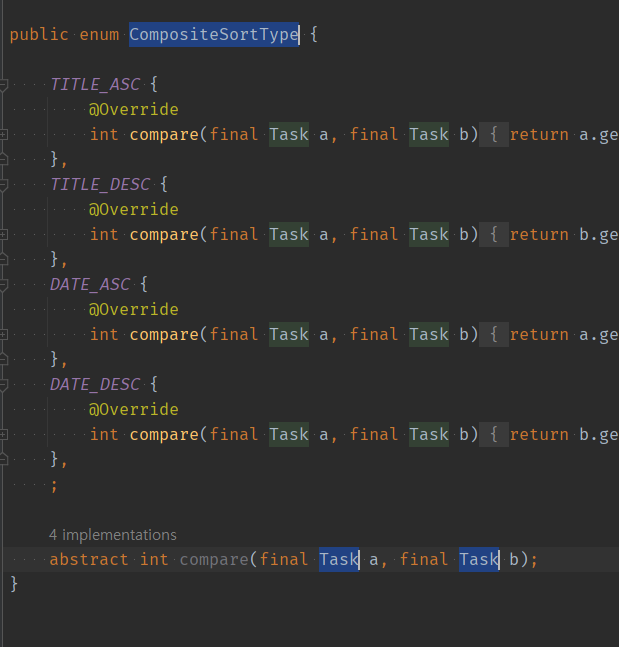
제한된 종류의 값type은 enum(애넘)으로 만든다.
- 객체를 정렬할 때, 그 기준은
해당 객체가 가진 필드를 기준으로오름차순/내림차순이 있을 것이다. 필드의 종류마다 _ASC, _DESC형식으로 enum필드를 만들어준다.
- 객체를 정렬할 때, 그 기준은
-
객체지향에서는 직접일을 하지않고,
enum필드라도 객체에게 일을 위임한다.-
값type이라고 인자를
위임해줄 객체가 아니라값으로 본다면? swtich문이 들어가게 된다. -
swtich문 == if문이 싫으면 전략객체로 바꿔주면 된다.
-
enum은 싱글톤처럼 인스턴스를 미리 확정지어서 만들어주는 것이다.
-
인스턴스를 static초기화 전에, jvm이 만들어주는 인스턴스이므로
- os가 보장하는 인스턴스, thread시작전에 만들어진다.
- thread에 안전한 인스턴스를 만들 땐, 1개는 싱글톤객체, n개의 인스턴스만들라면 enum으로 만들어야한다
- 싱글톤객체를 만들 땐, syncronized를 걸어야하는데, enum은 안걸어도 된다.
-
인스턴스를 static초기화 전에, jvm이 만들어주는 인스턴스이므로
-
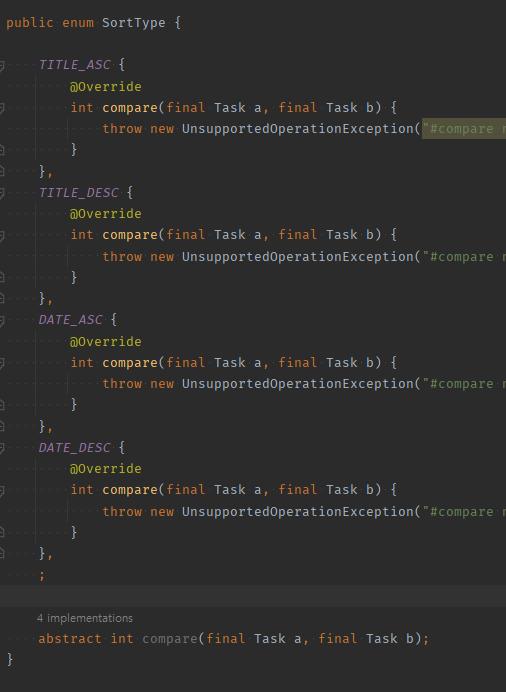
SortType을 클래스로 보고, enum필드들을
이미 만들어진 인스턴스들이라고 보자.-
enum은 내부적으로
enum필드로 만들어진 인스턴스들의추SortType추상클래스가 되며,;이후에 정의된다.- 공통로직을 정의한 클래스
-
enum은 내부적으로
-
enum은 ;뒤로는 추상클래스로서
abstrac 메서드를 정의할 수 있다.- 이 때,
정렬을 하려면 Task a와 Task b를 compare해야한다. - 이렇게 추상메서드를 정의해놓으면,
인스턴스 4개는 추상메서드를 구현해야만 한다
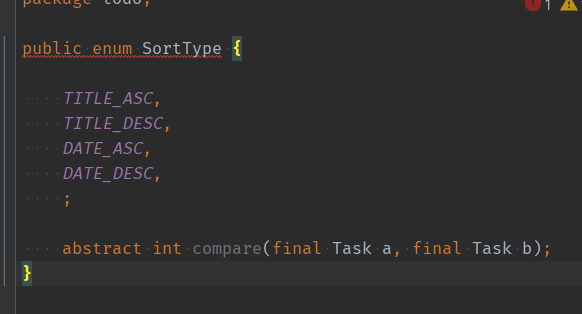
- 이 때,
-
-
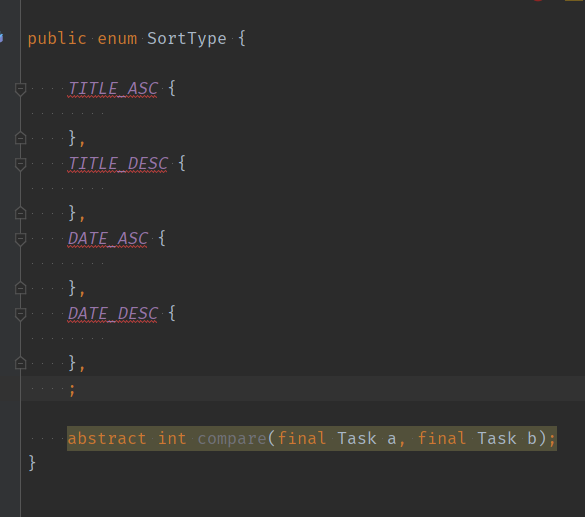
enum을 ;아래 추상클래스의 추상메서드를
구상class없이 익명class로 구현하는 분신술로 보고공통로직 추상메서드를 구현하도록 한다- 익명클래스를 구현해서 인스턴스를 생성하는 과정과 똑같은 과정인데,
단지, thread문제가 생기기도 전에, jvm에서 만들어주는 것이 다르다
- 익명클래스를 구현해서 인스턴스를 생성하는 과정과 똑같은 과정인데,
-
이렇게 enum객체에
sort()에 들어갈 인터페이스Comparator(compare 구현 인터페이스)을 위임한전략객체 4개 enum으로 만든 것이다.-
전략객체의 전략메서드로 대신했다면, [메서드 1개의 함수형 인터페이스Comparator]가 들어갈 자리에 람다식[ (인자) -> 전략객체.전략메서드(a,b) ]처럼 ` (인자) -> 추상체Enum의 객체.Enum속(공통)추상메서드()`를 넣어주면 된다. -
Comparator는 함수형 인터페이스로서 Consumer의 .accept()나 runnable의 .run()처럼
내부에서는 함수형인터페이스 추상체.compare(실제인자a,실제인자b); 호출 == 전략객체.전략메서드(); 내부정의와파라미터에선 함수형인터페이스 추상체 파라미터(전략인페-추상체) + 외부 입력인자는 전략메서드구현 구상 전략객체나(가상인자) -> 가상인자로 전략메서드 실시간 구현의 람다식이 필요하다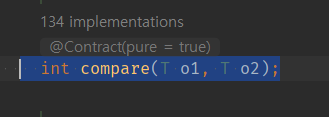
- 내부정의는
.sort( Comparator파라미터 )의 내부에서 실제인자로 전략객체.전략메서드 호출(실제인자); 이 정의되어있다
- 외부에서는 가상인자를 통한 전략메서드 실시간 구현 람다식을 전략인터페이스 인자 자리에 넣어줘야한다.
- 이 때, 람다식+가상인자를 통한 전략메서드compare 실시간 구현에 필요한 것이 외부에서 보내준 정렬방식 값객체이자 compare구현을 위임받은 SortType객체이므로, 해당객체에서 정의된 compare로 전략메서드compare를 구현하게 한다.
- 내부정의는
-
-
enum의 필드들의 익명클래스 compare들을 구현해준다.
- String의비교는 compareTo()로서
>=< 0없이 비교만해주면 된다. - 역순이라면 compareTo에 들어가는 인자만 바꾸면 된다.
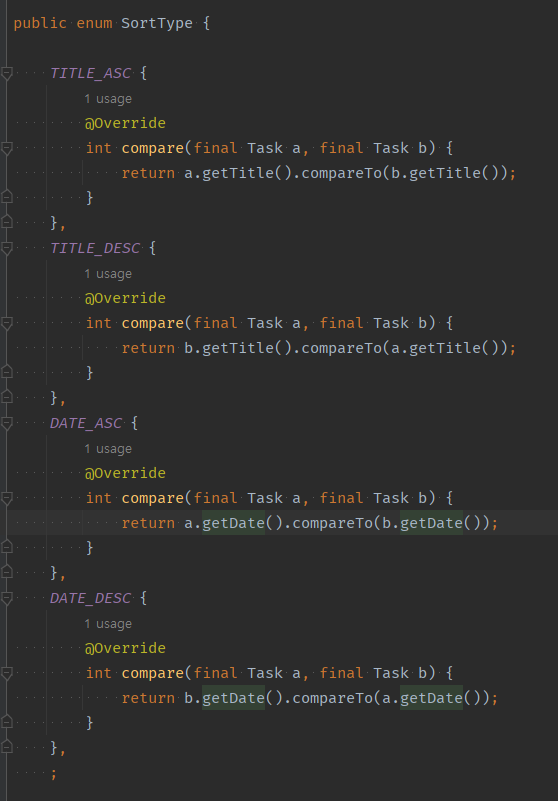
- String의비교는 compareTo()로서
-
우리는 처리를 위한 값type인 SortType을 enum을 선택하고, enum을 추상클래스로보고 내부 익명클래스로 구현하여, 각 enum객체들이 정렬에 관한 인터페이스를 구현하도록 전략패턴으로 위임했다.
- 우리가 class를 만드는 것은
인스턴스가 n개 이상이야끝을 모를 때만 만든다. -
우리가 인스턴스 갯수가 확정일 땐 class로 만들면 안된다.- 왜냐면, 다른놈이 해당 class의 인스턴스를 더 만들어낼 것이니까.. 안잠겨있으니까!
- 무조건 발생한다 생각한다. 그 상태가 오류라고 생각한다.
- 인스턴스가 1개만 있어야하면 된다면, 싱글톤패턴으로 만든다.
- 인스턴스가 n개만 있어야한다면, enum으로 만든다.
- 클래스를 만들기 전에 enum을 통해서 객체의 수량을 한정지어야되는지 결정부터 하고 class를 만드는 것이 java에서 맞는 방법이다.
- 왜냐면, 다른놈이 해당 class의 인스턴스를 더 만들어낼 것이니까.. 안잠겨있으니까!
- enum을 쓰면 수량오류가 안생긴다.
- 우리가 class를 만드는 것은
- 밖에서는 tasks사본을 받게 된다. 그것을 작업을 하든 뭘하든 하면 된다.
- 지금까지 컴포짓패턴을 쓰려고
파일과폴더를 만든 것이다.
파일과 폴더를 합친 composite객체(CompositeTask) 와 파일+폴더정보를 묶어서 출력할 사본Composite객체(TaskReport)만들기
- todo안에 또 todo들을 만들고, 그안에 또 todo들을 가질 수 있다.
- 업로드시스템도 왼쪽메뉴가 끝없는 tree depth를 가질 수 있다.
-
나는 파일(task)이면서, 그안에 자식들을 가지는 폴더(tasks)가 되게 된다.
- 컴포지트 패턴은 4가지 구성요소가 있는데, 1class에 4가지를 한꺼번에 구현할 것이다.
-
CompositeTask 클래스를 새로 만들고 , task과 tasks의 내장을 다 가져올 예정이다.
-
CompositeTaks는 기본적으로 Task이므로, Task의 코드를 다 가져온다.
- 이 때, 폴더에서 파일 추가시
수정비용 최소화를 위해, 폴더객체내부에서 생성을 위해, 생성자를 default로 걸어놨던 것을public으로다시 바꿔준다.- 왜냐하면, Composite는 더이상
폴더객체 내부에서 생성되는 파일객체가 아니라파일+폴더역할의 객체기 때문에 - 내장을 긁어올 때, 생성자의 이름은 생성한 class로 다시 바꿔줘야한다.
- 왜냐하면, Composite는 더이상
- 이 때, 폴더에서 파일 추가시
-
또한,CompositeTaks는 기본적으로 Tasks(폴더) 역할도 하니, 내장을 다 긁어오되,
task랑 겹치는 필드와 생성자는 빼고가져온다.
-
간과하기 쉬운 것 ->
생성할때 받고(생성자) + 변하기도(setter) 하는 필드는받을 때 가공처리를 setter에 배정후, setter를 생성자에서 사용한다.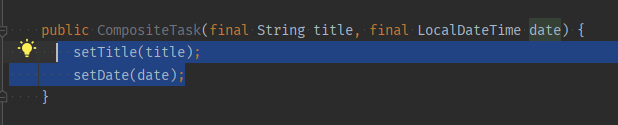
-
현재 CompositeTask는 task이자, sub_task들을 붙일 수 있게 되었다.
-
**이제 Tasks(폴더)와 Task는 안쓰게 되었다. **
-
CompositeTask에 붙인
Tasks의 내장속에 사용된Task들을 모두 CompoisteTask로 변경한다.- 함수형인터페이스의
가상인자 람다식도, 그 주체가 바뀌면 자동으로 변환 추천해준다. -
바꿀 때는
ctrl + d의Select next occurrence를 이용해서하이라이팅만 해서 바꾸자- 변수가 아니라 여기저기서 쓰이는 형이므로
ctrl + h로 한번에 다 바꿀수 없다.
- 변수가 아니라 여기저기서 쓰이는 형이므로
- 함수형인터페이스의
-
-
task관련 메서드들은 task관련 메서드보다 내려서 정렬해주자.
-
현재 CompositeTask를 보면 Set(컬렉션)데코객체가 되었다.
-
기존에는 구간처리시 prev데코객체, 순차적 기능추가시 구상 next데코객체를 사용해서 linkedlist로 연속된 처리를 for문이나, 꼬리재귀를 통해서 해줄 수 있었다.
-
데코객체가 같은형의 컬렉션필드(Set)필드를 가지는 순간
무한뎁스가 가능해진다.
-
-
폴더인 tasks의
자식 반환 기능인정렬방식을 받아 list제공기능이 바뀌어야한다-
현재
- 컬렉션의 사본 반환 -> 생성자 복사를 통한 얕은복사 사본이 바로 가능하다.
- 컬렉션 1개만 반환 -> 여러 필드의 반환이 아니므로 객체 만들필요없이 바로 반환가능하다.
-
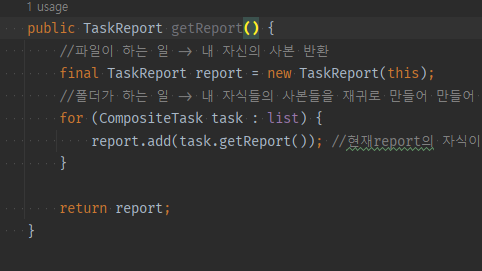
나 자신(task1) + 자식들(set -> list)모두 반환되어야한다.set을 list로 변경해서 반환->반환메서드는 내가 하지말고 내부에서 변환을 다른객체에 위임해서 처리할 수 있다. 여기서는 직접 얕은복사로 사본을 만들었다.서로 다른 필드 2개를 묶어서 반환해야한다.- >묶어주는 처리는 반환메서드 내부에서다른 객체에게 객체생성으로 위임해야한다.- 값의 반환이 아니라,
컬렉션반환부터는 사본으로 반환해야하는데컬렉션이 포함된 객체(컬렉션 + 다른필드)의 자신this를 반환하고 싶다면, 나의 사본class를 만들어서 반환한다.
-
객체의 사본은-Report객체를 만들어서 반환한다.
-
-
컬렉션을 포함한 객체의 반환 = 사본 객체
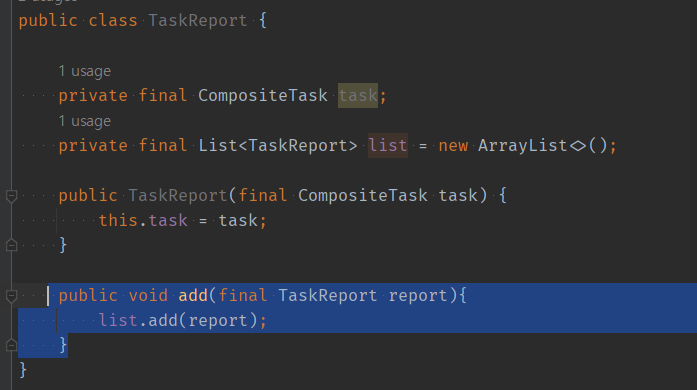
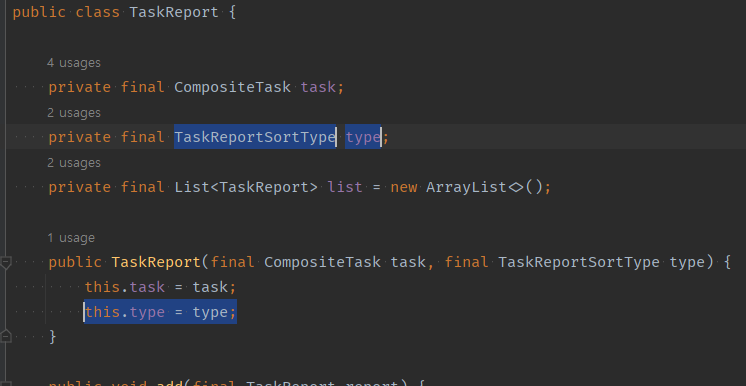
TaskReport클래스를 만든다.
-
출력될 사본 속 반환후보1. 나 자신인 CompositeTask필드를 만든다.
-
출력될 사본 속 반환후보2. 컬렉션 자신필드인 내 자식들 컬렉션을 Set대신 List로 변환된 것을 보유해야한다.
-
-
컴포짓객체의 사본인 TaskReport는 반환후보2인
List<CompositeTask>를 필드로 가져야하나?
- 내 자식들 컬렉션을 Set대신 List필드로 변환되어 가지고 있되
List<CompositeTask>가 아니라,,, List<TaskReport>를 가진다. -
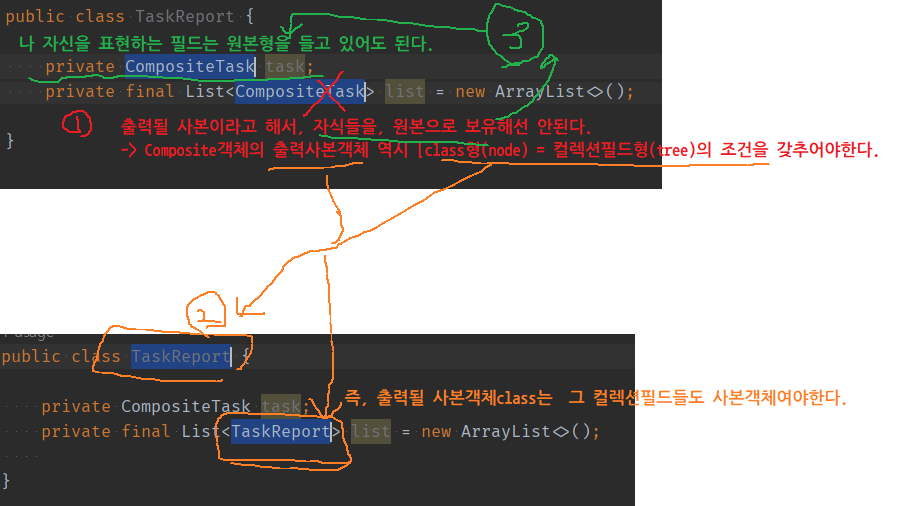
무한뎁스를 자랑하던 CompositeTaks처럼
TaskReport도 무한뎁스를 가진체 출력되어야한다.(동일형)Set컬렉션(을 들고 있는) 데코객체로서자신형의 컬렉션 필드에다가 자식들을 달고 있어야무한뎁스가 가능하다.
- 내 자식들 컬렉션을 Set대신 List필드로 변환되어 가지고 있되
-
TaskReport가 CompositeTask의
출력될 사본을 담당한다면,자식들도 다 출력될 사본인 TaskReport를 가지고 있어야하므로TaskReport가 List의 타입으로 와야한다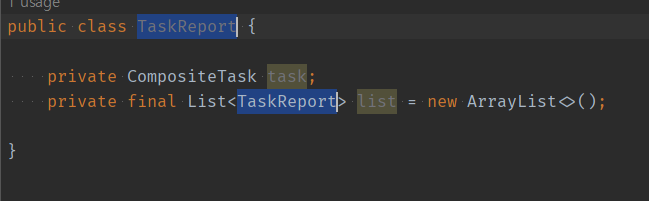
-
왜 그렇다면 사본 속 나 자신은 CompositeTask로 필드를 만들었을까?
- tree구조와 상관없는
나 자신의 정보 필드는아무형이나 갖다써도 된다 중요한 것은, 나 자신의 자식들을 컬렉션+나와 같은형으로 들고 있는 것이 중요하다.
- tree구조와 상관없는
-
왜 그렇다면 사본 속 나 자신은 CompositeTask로 필드를 만들었을까?
-
나 자신의 사본인 CompostieTaks 는 이미 생성되어있고
변하지 않아, 생성자에서 최초 주입 -> final로 확정하여 setter는 안만든다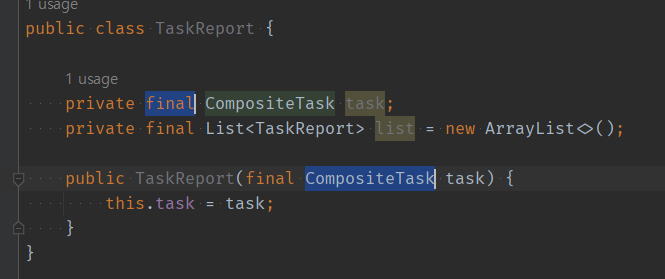
-
나의
출력사본 자식들은 바깥에서추가를 해줘야하는 변수 -> 필드초 빈컬렉션 초기화 -> add(Setter) 추가해줘야한다.- 출력사본객체를 만들 때,
원본에 더해진 자식들을 반복문으로 돌면서 출력사본의 자식으로 그대로 add하는 과정이 발생할 것이다.
- 출력사본객체를 만들 때,
-
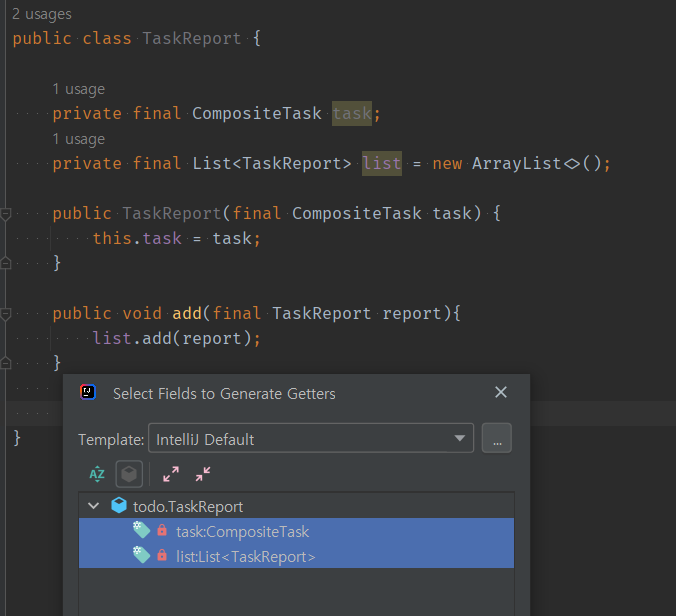
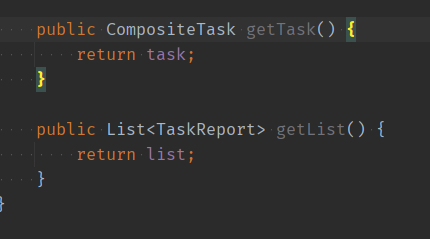
출력하기 위해 묶은출력사본 객체라도출력을 하는 곳에서는 각각의 필드 정보(나 자신+자식들)을 제공해줘야하므로,각 필드에 대한 getter는 필요하다- report의 실체
- task -> 자식이 없는 사본task인 report ->
바깥에다가 report를 만들어주면 -
출력책임이 있는 놈은,
report의 getTask or getList를 통해, 자기자신 + 자식들을 받아가 출력하려고 할 것이다.- 자식들을 받았으면 반복문을 돌면서, 각 개별 자식들도 하나의 task가 되어, getTask + getList자식들을 요청할 것이다.
- task -> 자식이 없는 사본task인 report ->
- report의 실체
-
이제 4가지 기능 중에 3가지는 나왔고, 사용하는 쪽과 그에게 제공할 operation()기능만 남았다.
- 이제
원본인 CompositeTask가출력을 위해List를 만들어 제공할 때,출력 사본인TaskReport를 만들고 사용한다.
- 이제
-
원본 컴포짓객체인 CompositeTask가, 외부에 출력용으로 자신+자식들을 반환할 때출력사본용 컴포짓객체 TaskReport를 쓴다.-
현재
-
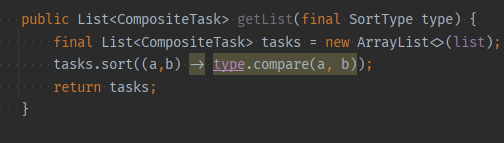
이제 외부에 제공을
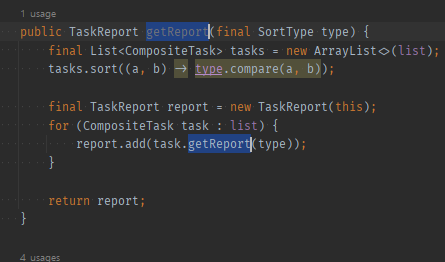
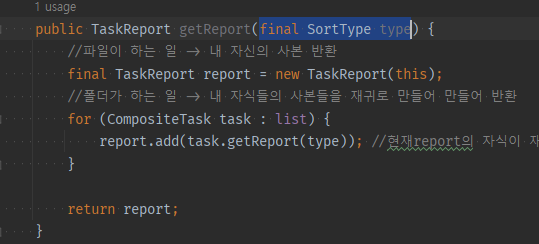
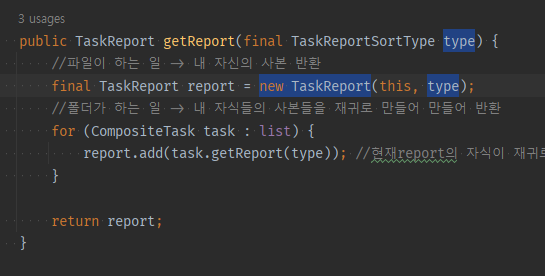
폴더가 자식들만 반환하는getList메서드 + List<자신task>형태가 아니라getReport메서드 + 자신&자식들묶은 사본객체로시그니쳐를 변경한다.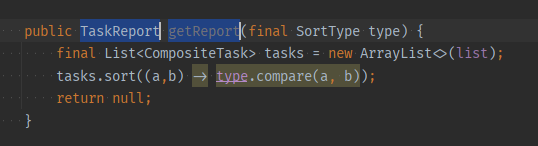
-
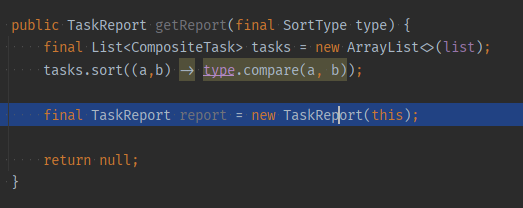
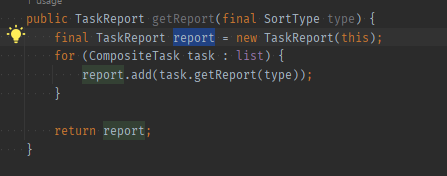
내부에서는 new TaskReport를 만든다.
객체 자신의 사본을 내부에서 생성할 땐,this로 객체 자체가 들어간다.
-
-
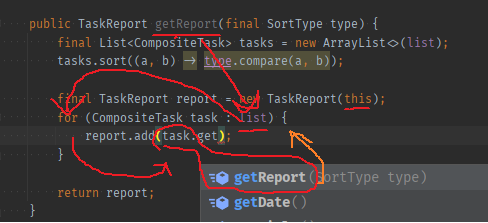
출력사본 객체도 컴포짓객체이므로자식들을 만들고 add 끼워넣어야한다. 그러려면원본객체 내부(현재context)에서 자식들을 for로 돌면서 -> 자식들 또한 report로 변환하여 add해준다-
Report도 컴포짓객체라컬렉션 필드에 자신과 동일형으로 자식들을 받는다. -
자식들task를 돌면서, 자식들을 report로 변경하는 방법은?
-
본인 내부에서의 변환은new TaskReport(this)였지만, -
외부 task객체 상태에서의 변환은현재 정의하고 있는 getReport(SortType type)호출해야한다.-
즉, 재귀형식으로 부른다.
- 재귀호출은
마지막 스택에서 호출없이 끝나는 종착역을 가져야하는데,-> 다음 자식 -> 자식메서드의 재귀로 안가려면for문에 걸리는 자식이 없을 때이므로, 자식없으면 알아서 재귀호출이 종료된다. - prev,next데코객체는 종착역이 데코객체필드 null을 지정
- 컬렉션데코객체(컴포짓객체)는 종착역이 자식컬렉션필드가 빈 컬렉션 -> 자식이 add안된 task라면, 이미 종착역
-
-
-
컬렉션데코객체의 컴포짓패턴은,자신 내부출력사본 객체를 만드는 곳에서 재귀호출이 발생하며,출력사본 객체 반환메서드를 작성도중에not꼬리재귀로서, return이 아니라 for문 내부에서 자식들의 출력사본객체 만들 때발생하며,종착역은, 해당 재귀호출이 없게 되는 for문을 안거치는, 빈컬렉션으로 자식들이 없는 객체에 도달했을 때이다.- prev, next데코객체는 자신내부 계산처리 부분에서 prev필드나 next필드의 메서드를 호출해서 재귀를 호출하며 null을 가진 객체의 차례에서 종착역 터미네이팅했었다.
-
위에 두줄은 필요없으니 삭제한다.
-
-
composite패턴에서 composite객체를 실제 사용하는 것은 원본내부에서 외부에 제공할 출력사본을 만드는데, 출력사본 composite객체를 생성하는 과정에서 재귀를 사용한다.
- 역할4개가 다 사용되었다.
-
참고 벨로그
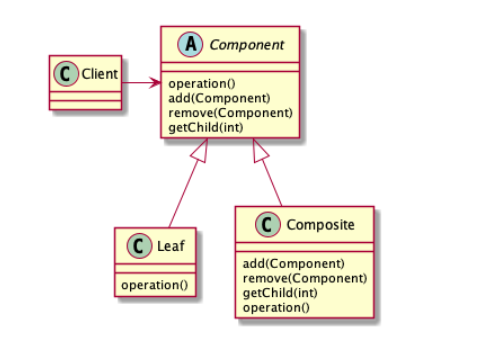
- add + remove + getChild(getList)
- getReport( getList + operation)
-
참고 벨로그
- 파일+폴더를 합친 컴포지트객체는 if로 파일 or 폴더를 구분할 필요가 없다.
- 역할4개가 다 사용되었다.
-
이제 report생성시 정렬인자가 Task를 정렬하는 SortType이 아니라 CompositeTask를 정렬하는 CompositeSortType을 생성해야한다.
-
기존 Task를 정렬하던 SortType은 그대로 두고 복사해서 생성한다.
-
기존 getReport
-
인자를 변경하여 CompositeSortType을 새로 만들 건데, SortType내용을 복사해서 수정한다.
-
이 때,
사용하는 파라미터 형만 변경된다면 Task -> CompositeTask제네릭 적용을 생각해본다.-
만약 enum에 제네릭이 적용될 수 있다면,
기존 파라미터의 형을 SortType -> SortType<Task> + SortType<CompositeTask>로 사용할 수있을 것이나,enum에서는 제네릭이 사용안된다.- enum은 내부적으로 class로 취급해주지 않는다는 말이다.
-
enum이 제네릭이 적용안되는 순간부터
enum을 추상클래스<T>제네릭조합으로 변경 + enum필드==인스턴스들(익클분신술) 4개의 훅구상체class로 변경해야하는 타이밍이기도 하다. -
하지만, enum의 thread안전성을 이용한다. 추클+T조합으로 바꾼다면, 인스턴스 생성과 동시성(싱글톤)문제를 내가 처리해야한다.
일반적으로 기업코드는 동시성문제가 훨씬더 무섭다 -> 코드중복을 허용해서라도 동시성 문제를 해결한다.- 반대로 안드로이드플랫폼에서 enum을쓰면 엄청느려지기 때문에 안쓰기도 한다.
-
-
CompostieSortType의 인자를 Task -> CompositeTask로 변경해준다.
-
-
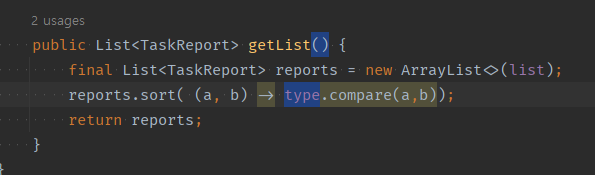
더이상, CompositeTask는
정렬된체로 외부에 제공하는getList( sort )의 역할이 사라졌다.외부에 정렬된 상태로 자식들List를 반환하는 것은TaskReport의 getList( )이므로정렬방식 파라미터를 여기로 옮긴다.- CompositeTaks의 getReport는 사본객체만 만들어내는 역할. 파일+폴더정보를 묶어서 가지고 있는 사본객체가 외부에 list를 제공해준다.
-
외부 컬렉션 제공부터는 사본을 만들어서 반환한다-
각 요소가 외부에서 public메서드를 가져 조작가능한 객체라면, 요소들은 그대로 있고, 컬렉션 주소만 바뀌도록 얕은복사를 해준다.
- 컬렉션은 건들지말되, 요소들을 변경하고 싶으면 뽑아서 해라!
-
각 요소가 외부에서 public메서드를 가져 조작가능한 객체라면, 요소들은 그대로 있고, 컬렉션 주소만 바뀌도록 얕은복사를 해준다.
-
CompositeTask#getReport
-
TaskReport#getList
-
CompositeSortType-> TaksReportSortType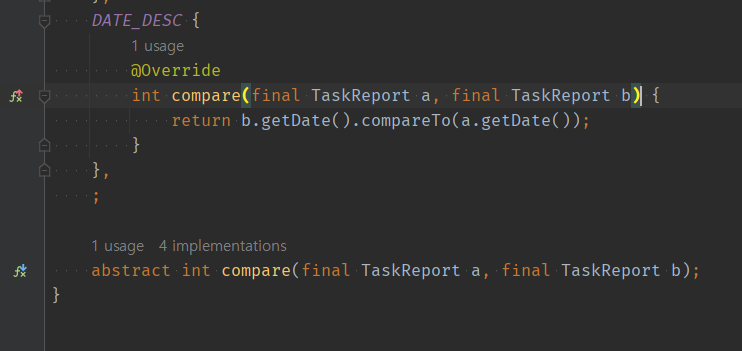
-
래핑된 객체의 필드로 정렬되므로,
getter 추가 및 내부객체->필드까지
-
-
파일 + 폴더 반환기능을 위임받는 출력사본 report객체는
파일반환도 해줘야한다.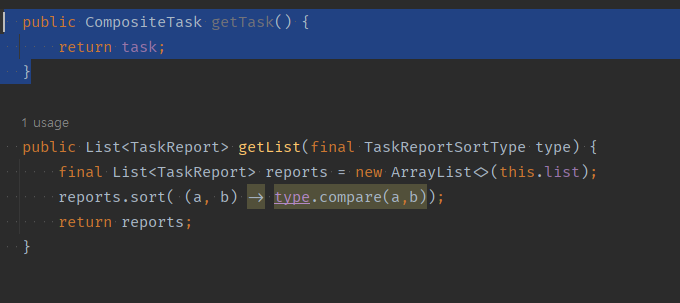
Main에서 Composite객체 및 출력사본 CompositeReport객체 사용하기
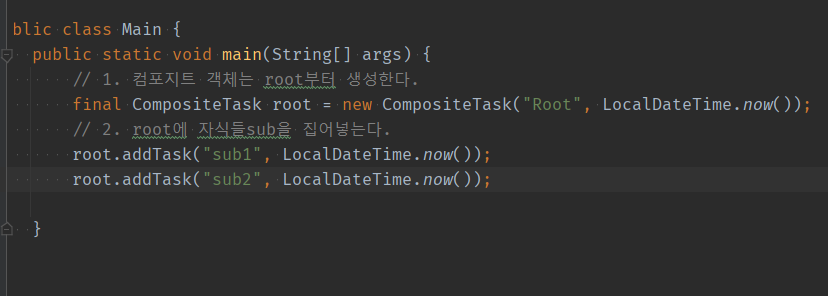
-
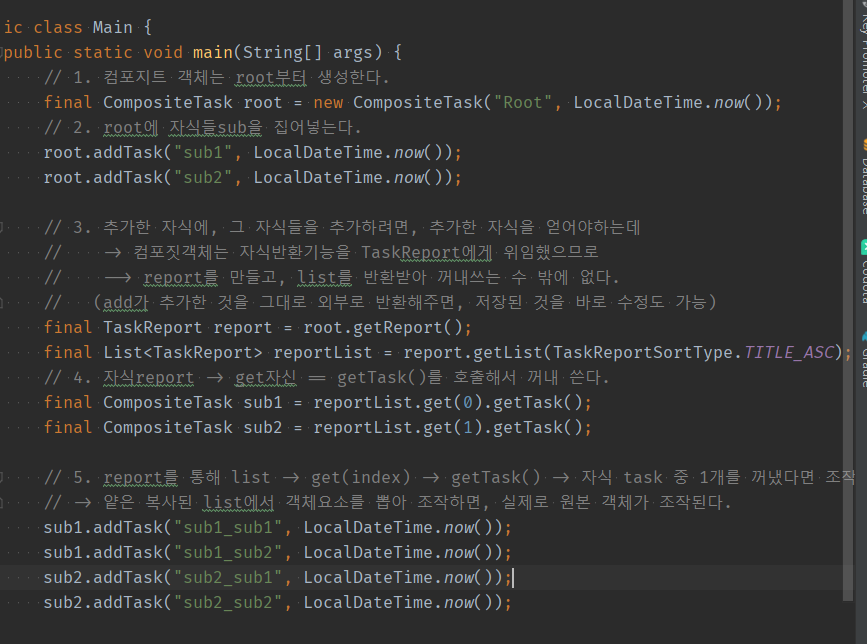
root를 만들고 자식들을 추가한다. 1개의 컴포지트 객체를 공짜로 받아와 add하는 순간은 지금 뿐이다.
-
sub1(자식)아래에 자식들을 넣으려면
list를 통해 반환받는 수 밖에 없으며, composite객체는 list제공기능이 없고,출력사본으로서 자식list를 제공해주며, 얕은 복사를 통한 제공으로, 요소들을 꺼내서 조작가능하게 하는 것은TaskReport를 통해 받아보는 수 밖에 없다- sub들을 얻을 수 있는 유일한 방법: 현재객체의 출력사본 report생성 -> list를 반환 -> 꺼내서 씀
-
CRUD처럼,
if addTask가 [실시간 외부조작 가능한 객체]를 추가한 것을 그대로 반환해주면,추가된 객체를 list에서 받지 않고, 그대로 객체 조작할 수도 있을 것이다.
-
- sub들을 얻을 수 있는 유일한 방법: 현재객체의 출력사본 report생성 -> list를 반환 -> 꺼내서 씀
-
컴포지트객체는
폴더-파일구조를 바로 확인할 수없다.- 오여주는 애인 Renderer를 정의해서 봐야한다.
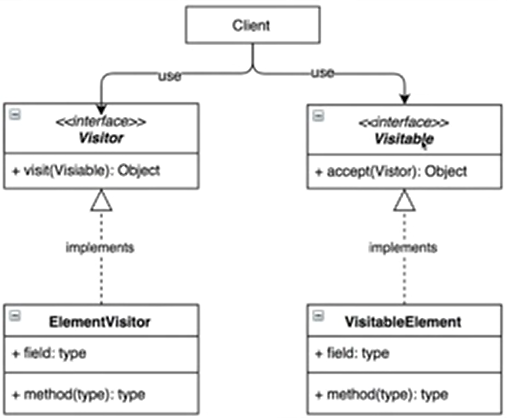
Renderer: 순회의 제어구조 -> Visitor패턴으로 프레임웤 만들기
- 컴포지트 패턴은 결과물자체도 컴포지트하게 생겼다.
-
컴포지트 객체를 이용해 만든 Report도 컴포지트하게 생겼다. = 컴포지트를 순회해서 만들었다.
- 안에 모아놓을 수 있다.
- 또한, Report를 소비하기 위해서는 또 컴포지트 패턴을 순회해야한다.
-
컴포지트 객체를 이용해 만든 Report도 컴포지트하게 생겼다. = 컴포지트를 순회해서 만들었다.
- 컴포지트 패턴을 보려면, 컴포지트 패턴을 다시 순회할 수 있는 순회자를 만들어야한다.
- 하지만, Report와 달리
순회자는 제어구조다. 순회의 제어구조는 라이프사이클을 정해두되, 해야할 일은 바깥쪽에서 위임하여 라이프사이클을 탈 수 있다.- 즉,
순회자=제어구조가 해야할일을 거꾸로 정의할 수 있다라면, 프레임웤이 된다.Visitor패턴은 처음 배우는 프레임웤이다.
- 하지만, Report와 달리
-
출력을 담당하는 class(Renderer)가 제어구조를 가져야한다면,
제어구조에서 제어의 역전을 위해 Visitor를 입력받는다.-
Renderer는 다양한종류의 할일을 하는 visitor(다양한 기능의 전략패턴)을 받아들이는
Visitable이지만, 여기서 renderer는순회의 제어구조를 가지고 있는 프레임웤으로서 여러종류를 가지는 것이 아니기 때문에전략패턴으로 생성하진 않는다.- visitable이 인터페이스가 아니므로, 필드를 가지는 구상클래스로서 visitor을 생성자 주입 받는다.
- visitable이 인터페이스가 아니므로, 필드를 가지는 구상클래스로서 visitor을 생성자 주입 받는다.
- 제어의 역전으로
라이프사이클을 타면서 일을하는 Visitor 종류만만 달라지므로생성해서 그때그때 사용한 생성context로 간주하여 일반 클래스로 만든다.
-
Renderer는 다양한종류의 할일을 하는 visitor(다양한 기능의 전략패턴)을 받아들이는
-
Visitor는 원래 인터페이스로 들어온다. 여러 종류의 할일(라이프사이클마다 그에 맞는 데이터가져다주는 기능)을 가진다.
-
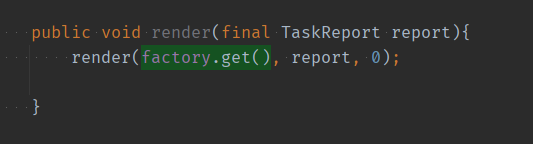
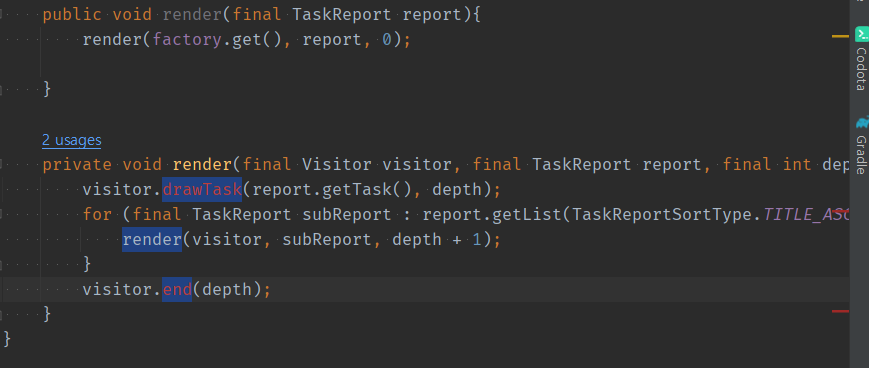
Renderer의 역할은
TaskReport를 받아서,결과물을 바깥에 주는게 아니라(public Item) 출력render(public void)만 해준다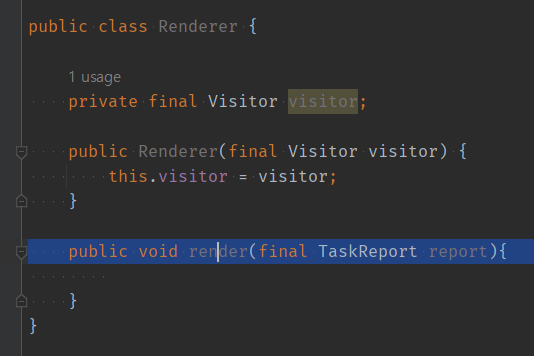
-
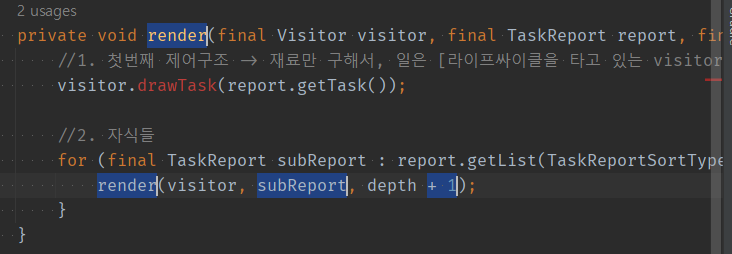
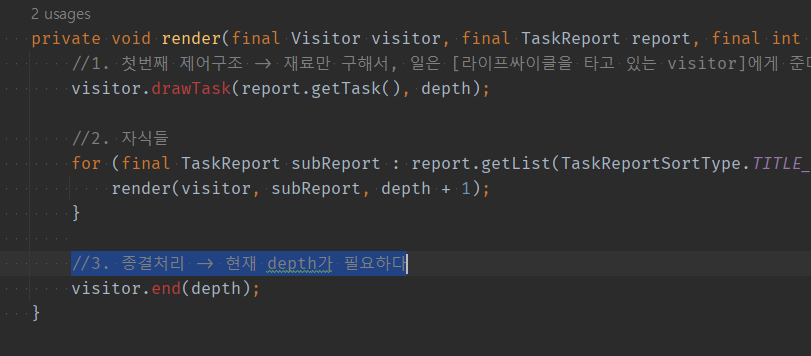
render내부에서는
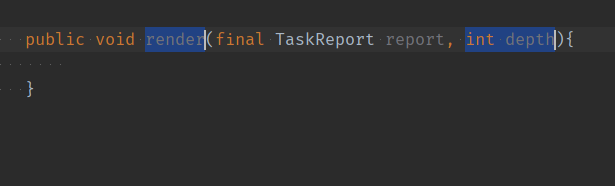
컴포지트 객체를 만드는 방향과 동일한 방향으로 순회할 것이다. 문제는순회하며 그릴 때 depth가 생겨난다는 것이 다르다.- **보이진 않지만,
인자가 더 필요하다. `누적되는 depth의 초기값을 밖에서 주는 꼬리재귀구조로서, **- 계층적, 재귀적인 구조는 구조객체 이외에 depth정보도 인자로 달고 있어야한다.
-
컴포지트 구조도 순회하려면 정해진for가 아니다- 더 깊이 들어가는 애도 있는
동적트리 순회 구조이다. - 실무에서는 정해진 트리구조만 다 도는 것이 아니다. 리프가 다양한 구조로 있는 여러구조체를 돈다.
- 더 깊이 들어가는 애도 있는
-
동적트리 순회시에는최소한의 depth정보를 누적결과값으로 물고다녀야한다- **
계층적, (꼬리재귀)적, 동적트리 구조의 순회는누적결과값파라미터를 물고, 최초호출시 인자에서 주어진다, **
- **
- **보이진 않지만,
-
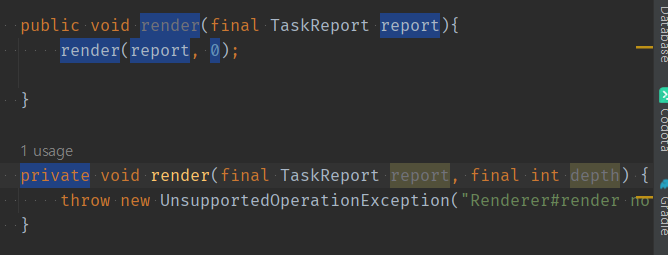
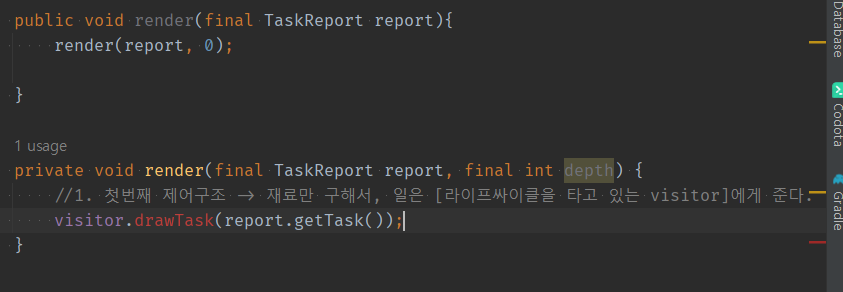
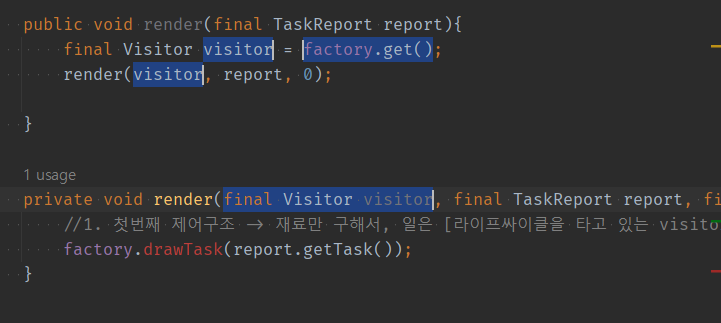
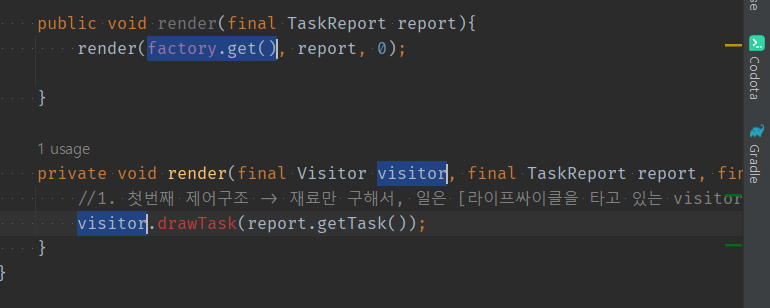
최초 depth는 0으로 주어져야한다. 하지만,사용자가 0으로 준다는 보장이 없다-> 이 때꼬리재귀를 위한 private메서드 추출이자최초(누적결과값변수의) 인자를 내부에서 상수로 주는 오버로딩을 드디어 사용한다.- **사용자(public)는 depth가 없는 render(TaksReport report)만 호출할 수 있게 한다 **
-
누적결과값 파라미터의 최초인자 0을 줘야하는 depth를 파라미터가 추가된 꼬리재귀 메서드는직접 0을 주고 내수용으로 오버로딩해서private(사용자 사용금지)으로 으로 생성-정의한다- **좋은 함수는 인자0~1개인 함수다.
더러운 것 = 인자 2개이상 && 직접 초기값을 줘야하는 함수는 ->전부 private으로 내부에서 하는 오버로딩으로 정의하면 된다. ** - 더러운 것은 안에서 하고,
바깥에는public 좋은 함수를 줘라
- **좋은 함수는 인자0~1개인 함수다.
-
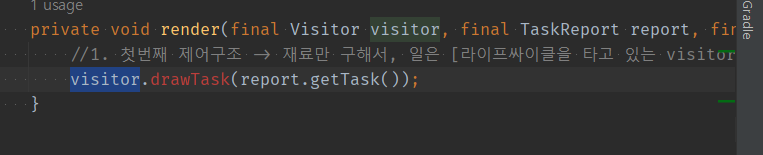
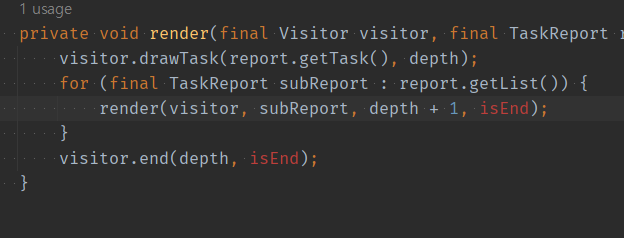
Visitor패턴에서 visitor를 받는 visitable(Renderer)는
1개의 메서드 안에 라이프사이클에 맞는 제어구조를 작성해야한다.- render메서드 안에서 다 작성해주자.
-
task부터 그려야한다. ->
visitor에게 task객체를 줘서 그리는 책임을 위임한다.내가 안한다. 라이프싸이클을 타고 있는 visitor에게 시킨다.
-
근데, 객체지향에서 생각해야할 것이 있다.
협력인스턴스가 생성하는 context(동시성 문제가 발생할 수 있어서, 매번 새로 생성할지)인지협력인스턴스를 소모하고 재활용하는 context인지 생각해야한다.-
협력인스턴스를 내부에서, 메서드호출마다 매번 생성하면동시성 문제가 하나도 없어진다 -
전략패턴의 visitor를 단일객체을 외부에서 생성된 것을 받아서new때리지 않고 있다. - 그러나 제일 안전한 것은
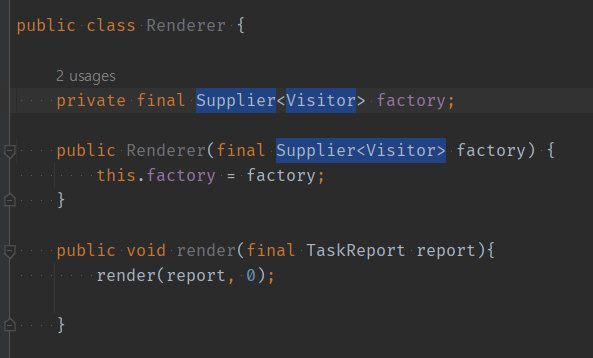
언제나 협력 인스턴스를 생성하는 것이다. 그러려면외부에서 생성된 협력 객체가 아니라, 외부에서 생성자를 받아야한다. -
생성자를 받는다는 것은,인스턴스를 return해줄 수 있는 (인자있)Functional or (인자없)Supplier를 받는 것이다.- 그래야 범용적인 Visitor를 매번
상태가 초기화된 협력인스턴스를 가질 수 있다. - my) 내부정보로 내부발행객체를 생성하는 것처럼, 협력 인스턴스가 추상체일 때 내부 발행하려면
- 외부에서 받아야하는 추상체변수로 new때리질 못한다. 외부에서 생성자 호출직전까지의 로직으로 받아야한다.
- 생성자 로직을 받을 때, 생성자 로직이라면 return이 필요하므로 Supplier나 Functional을 받고, 제네릭에는 받는 협력인스턴스 형을 T로 준다.
- 내부에서는 받은 로직을 실행하기 위해 .get() 나 .apply()를 통해 lazy evaluate의 연산지연실행 메서드를 사용한다
- 외부에서는
가상의 인자로 람다식을 통해 [생성자 로직]을인자로 전달해아~ 호출시마다 매번 해당로직이 지연실행되는 구나.생성자호출이라면, 객체생성이, 매번 되는 구나라고 생각한다.
- 그래야 범용적인 Visitor를 매번
-
-
협력인스턴스의 추상체 visitor를 이미 생성된 객체가 아니라,render()호출시마다내부에서 언제나 새로 생성해서 사용하기 위해Visitor주입 -> Supplier<Visitor> 주입으로 변경한다.- 변수명은 factory로 받는다.
-
visitor의 생성은, 꼬리재귀 호출전에 생성되어 인자로 줘야한다.
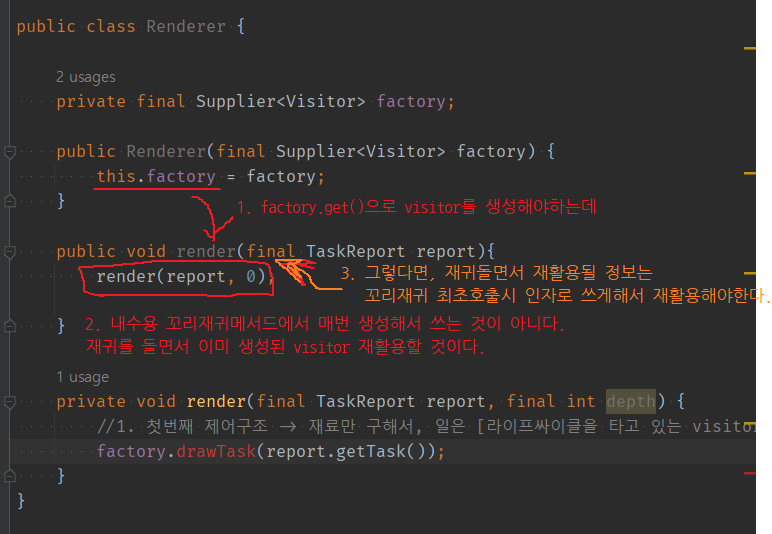
- 꼬리재귀에서 재활용하기 전에, 재활용될 visitor를 생성한 뒤, 오버로딩 된 꼬리재귀 메서드에만 인자로 추가한다.
-
java헛소리로서즉시 인자로 반영될 값이라면, 지역변수로 빼놔야 가독성에 좋지 않나요?라고 한다.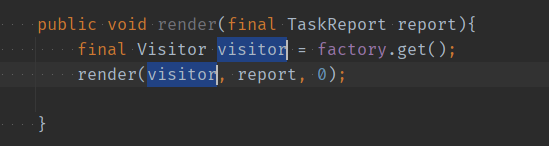
- 하지만,
인자에 넘어갈 변수 <-> 메서드 사이에지역변수를 통해 트랜잭션(검증, visitor.타메서드() 호출 등)을 안할 거면, 그리고 어려운코드가 아니라면, inline으로 쓰는게 맞다 지역변수가 있다. == 해당 변수로 추가적인 일을 시키고 나서 인자로 넘기겠다.지역변수가 없다. == 만든 변수를 건들지않고 인자로 바로 넘기겠다.
- 하지만,
-
꼬리재귀 정의부에서는
최초호출시 인자가 넘어와서, 누적/재활용되기 전 제일 처음 변수로 어떤 조작이 될 것이다.- 생성되고 제일 처음visitor로 task를 그린다.
-
Visitor가 상태를 가지는 인스턴슨지 뭔지는 모르겠지만,
호출시마다 매번 생성되는 상태니 동시성 문제가 하나도 없으며, 찌꺼기 상태값을 고려안해도 된다. -
우리는 gc를 믿고 개기는 것이다.
객체를 재활용할 생각 자체를 버리자 무조건 만들자. 객체지향은 new도는 것
-
파일(task)는 그렸으니, 자식들subtask들을 돌리 위해서는 반복문을 써야한다.
-
자식들도 하나의 task로서, 반복문내에서꼬리재귀render를 해야한다.- render해야 자신의 task를 그리고, 자식들마다 for문돌면서 task들을 다시 그린다.
-
**
꼬리재귀 내부에서 자식들의 (return or 마지막문장의) 종착역설정은 render를 안타게 되는 == for문을 안타는 ==빈List를 가진 자식일 것이다. ** -
데코객체가 아니므로 연결된 next/prev데코객체.꼬리재귀형태가 아니라
메서드 수준에서의 꼬리재귀는재귀재료에 [현재 주체]까지 모두 인자로 표현하여 다들고 다니므로, 호출인자만 업데이트된 인자로 [내수용 꼬리재귀 메서드 호출]로 재귀를 호출한다.
-
주체자가 report -> subReport로 바뀌었다.
- visitor는 그대로 재활용된다.
- depth는 1개 증가한 것으로 줘야한다.
-
-
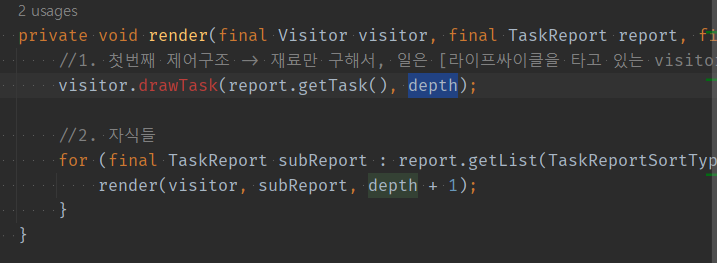
그렇다면,
자기자신을 그릴 때, 현재의 depth정보(자식은 +1)도 필요할 것이다.
-
라이프 싸이클에 따라,
visitor에게는 end(depth)를 호출해서task + 자식taks를 다 그린 [종결처리]를 해줘야한다.-
왜 꼬리재귀에서 따로 종결처리를 해줘야하지?
- 결과값을 누적하는꼬리재귀가 아니라
depth를 업데이트하며 출력만 하는 꼬리재귀이며,마지막 node일 때 출력이 달라지므로?
- 결과값을 누적하는꼬리재귀가 아니라
-
왜 꼬리재귀에서 따로 종결처리를 해줘야하지?
-
라이프싸이클에 따른 composite제어구조는 Visitable에 해당하는 Renderer가 다 가져갔다.
visitor는 라이프싸이클에 따른생명주기 함수들만 정복하고, composite제어에 대한 정보가 없다.- 제어와 실행을 분리하는 것이 visitor패턴이다.
- 앞으로 3년간… 어려운
제어를 실행하는 놈vs제어를 통제하는 구조를 분리하는 연습해야한다.
-
이제 인터페이스 Visitor에
제어를 실행하는 [라이프싸이클 함수] 2가지를 추가해준다.- 라이프싸이클 함수가 생기는 이유 ->
해당 인터페이스는 제어의 흐름에 들어가있는 visitor객체다
- 라이프싸이클 함수가 생기는 이유 ->
ConsoleVisitor: 제어구조에 끼워넣을 제어실행visitor 구상체1
-
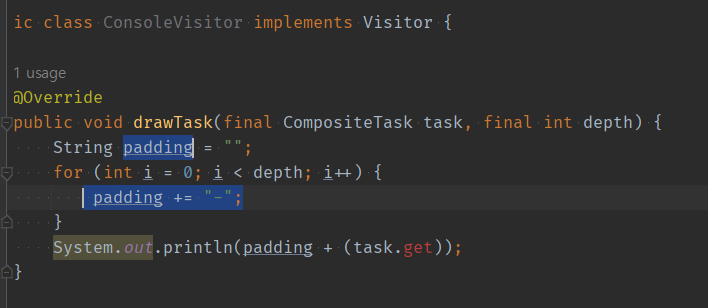
task1개를 표현하면, depth만큼
빈 padding문자열을 실제 padding으로 들어갈 문자열을 정해서 depth수만큼 누적합되어야한다.- depth만큼 반복문을 돌면서 정해진 padding문자열을 누적합한다.
-
padding이후 가장 먼저 표시해야할 것은 토글여부이다.
isComplete 필드의 getter를 만든다.-
보통 isXXX boolean필드의 getter는 get을 뺀다고 한다.
- 불린flag자체가.. return boolean변수이므로… 물어보는 것과 동일하다
-
isComplete()여부에 따라
[v]나[ ]를 표시하도록 삼항연산자를 활용해준다.
-
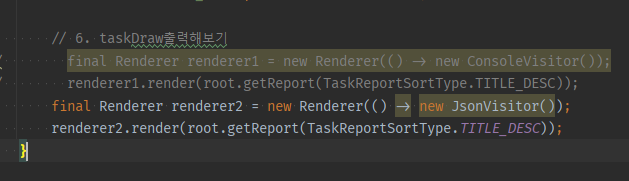
Main에서 render + consolevisitor로 visitor.taskDraw() 출력 확인하기
-
Render를 만들되 생성자에서는 내부에서
라이프싸이클을 타는 visitor객체가 제어메서드 호출시마다 새로객체를 생성하도록람다식으로 supplier제공해주기라이프싸이클타는 객체를 생성해서 넣어주지 않고,라이프싸이클을 가진 제어메서드호출시마다 생성하도록 하기 위해supplier or functional을 통한factory를 넣어줘서 생성한다고 표현한다.
-
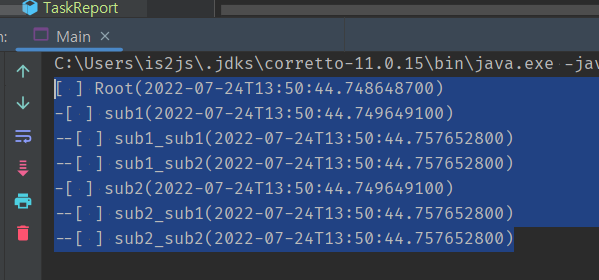
render.render( )시, 위에서 만들어둔 root를 report로 만들어서 넣어주기
-
출력해보기
- depth마다
-가 붙은 체로 출력된다. - 종결처리를 해주면 각 task마다 뭔가 표시를 해줄 것이다?
- depth마다
-
정렬방식 고민하기
-
현재 문제는, 정렬방식을 내부에서 정하고 있다.
원래는 root task를 통해 report를 만드는 getReport()시 정렬방식을 인자로 줘야한다.-
내 코드(report의 자식들을 꺼낼 때만 정렬방식 적용해서 제공)

-
되어야할 코드

-
-
task -> 내부에서 TaskReport만들때부터 정렬방식이 전해져야한다.
-
정렬방식 받는 것을 추적해서, task#getReport에서 정렬방식 인자를 주입하도록 하기
-
현재는 report에서 꺼낼때만, 정렬방식을 인자로 주입받고 있다.
-
Main에서 Report의 자식들을 꺼낼때, 정렬된체로 꺼내기

-
render시 내부에서 report들의 자식들을 꼬리재귀로 출력하려고 꺼낼때, 인자로 받는 중

-
-
하지만, report를 만들때(
task#getReport()부터이미 인자로 주어져서 정렬된 체로 report를 생성하도록 변경해야,render시, task -> 정렬된 report를 만들어 report만 넘기기를 할 수 있다.
-
JsonVisitor: depth를 가진 출력은 json형태라서 만들 수 있다
- 원래 json은 쌓아가야하는 drawTask시, string들을 쌓아가야하는 입장이다.
- sout이면 안쌓아도되고, 문자열을 원하면 쌓아야한다.
- 여기서는 sout로 간다.
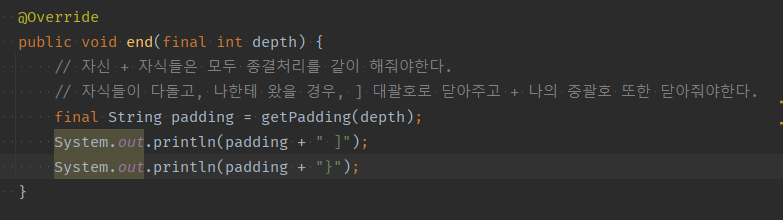
- json은 taks정보 + sub task들정보 + 다끝나면 중괄호가 닫힌다.
- end에서 할일이 있다.
-
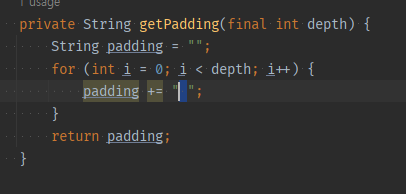
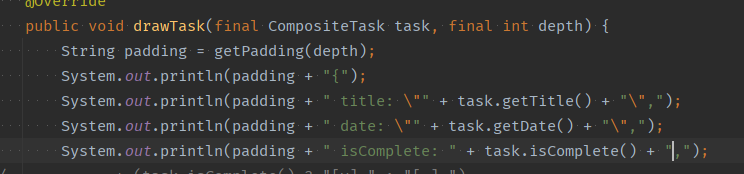
ConsoleVisitor의 내용을 가져오되,
처음 작성할때 drawTask의 padding만큼 밀리고, end에서도 padding만큼 밀리니->depth만큼 쌓이는 padding로직을 내수용(drawTask + end 공통으로 사용) 메서드 추출을 통해class 내부로 빼낸다
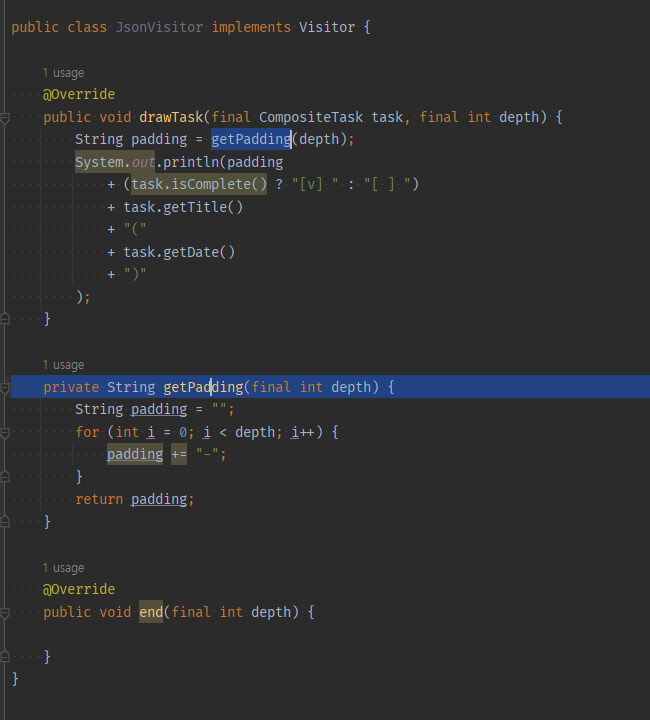
- 이 때, padding은 ` - -> “ “ 빈 문자열`로 바꾼다.
-
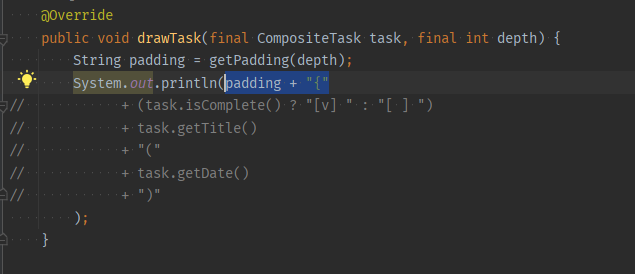
첫번째 줄은 padding + 중괄호{다
-
필드는 padding + ` 중괄호대신 공백
+필드명:+ 문자열이므로“내용”으로 양쪽 큰따옴표가 나가야하므로 java내에선"를 사용하며 + 끝날때는 콤마까지 가지고 가야한다.",`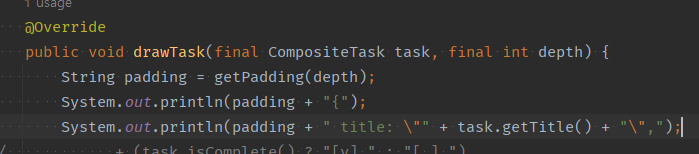
- 복사해서 date도 해결한다.
-
boolean은 내용에 큰따옴표가 필요없다.
- true, false는 자동으로 문자열로 true, false로 바뀐다.
-
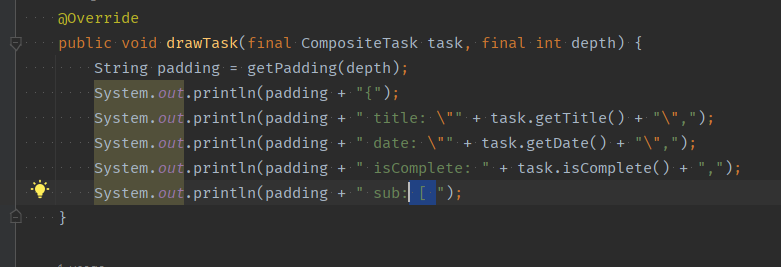
문제는 sub들이다.
sub: [내용으로 대괄호 + 공백인 상태로 주면,- 그담 task가, 자신의 패딩+ 중괄호로 열고 시작하게 된다.
-
대신, end의 닫기역할만 잘해주면 된다. 자신은 자기닫기만 잘챙겨주면, 된다.- **자식들을 가져, 1개의 누적결과값반환이 아닌, 반복문의 재귀에는 **
- 자신은 시작만 해놓고, 자식들을 호출하며
- 자신과 자식들모두 각자의 end의 종결처리가 필요하다.
- **자식들을 가져, 1개의 누적결과값반환이 아닌, 반복문의 재귀에는 **
- 종결처리
-
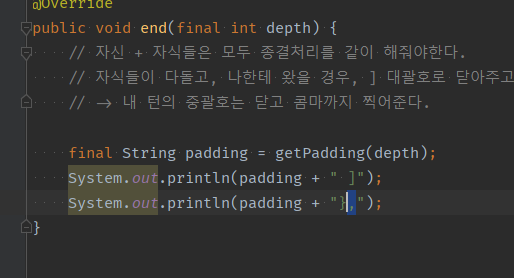
json의 괄호들은 내턴을 닫을 때,
중괄호뒤에는 }, 콤마를반드시찍어준다.- 자식들끼리 콤마로 연결되어야하므로.. 안찍어주면 에러다
-
root의 중괄호도 마지막이 콤마가 찍힌다.
-
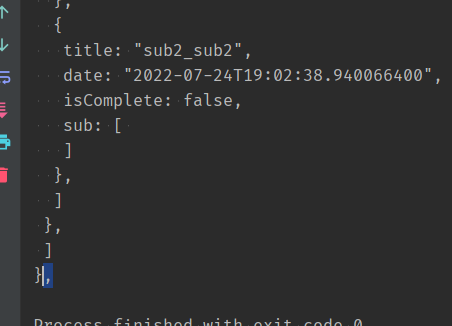
js에서 object에 트레일링콤마를 허용하자라는 말이 나온다.
-
트레일링 콤마(Trailing comma)는 여러 요소들을 쉼표(콤마)를 사용하여 나열할 때, 가장 마지막 요소 다음에 오는 쉼표를 말한다.
-
위 트레일링 콤마는 생략하여도 아무런 변화를 만들지 않으며 단지 수정을 편하게 하기 위한 도구이다.
-
한편 Go의 경우 배열을 여러 줄에 나눠 입력할 때 트레일링 콤마가 강제 사항이며 이를 생략하면 다음과 같은 에러를 발생시킨다.
-
-
-
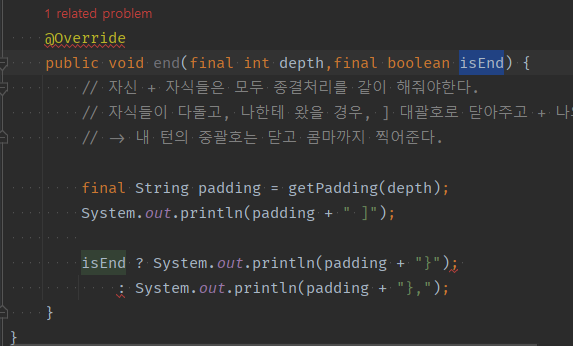
프레임웤을 visitor패턴으로 만들 때, 트레일링콤마를 허용안한다면,
end종결처리 메서드와 꼬리재귀의 파라미터에 isEnd를 추가해줘야하고+end에서 분기를 걸어줘야한다.- 프레임웤을 만드러보면, 트레일링 콤마를 쓰자고 한다.
Main에서 사용
프레임웤은 visitor패턴과 템플릿메소드패턴으로 구성된다.
- 몸통 : visitor패턴을 상속한 visitor객체들이 구현한다
-
가장 큰 프로세스(제어): templatemethod의 훅으로 통제한다.
- 스프링의 예
- 컨트롤러를 pojo로 만들면, 어노테이션(router)에 의해 visitor로서 작동한다.
- 그에 비해 스프링 interceptor는 템플릿메소드를 만들어서, 구상은 before/after intercept를 만들어서 훅을 구현한다.
-
큰 흐름은 템플릿메소드패턴으로 강제시키고, 안에 몸통의 유연성 + 다양한 라이프사이클은 visitor패턴으로 처리한다.
- 안드로이드 개발시 activity상속받으면 전부 라이프사이클함수 구현이다.
- 라이프싸이클을 타는 거대한 visitor객체였다.
- 안드로이드 개발시 activity상속받으면 전부 라이프사이클함수 구현이다.
- 프레임웤에서 구현해야하는 것들은 모두 visitor다. 제어구조를 역전시키려고
-
우리는 rendner1개에다가, visitor를 전략객체로서 공급했다.
- 큰범위는 다 전략패턴이다. 전략패턴은 추상체로 소유하면 다 전략패턴이다. 더 큰 범위
- 그 중에 visitor패턴은, 제어역전으로 제어능력을 잃어버린 전략객체(라이프싸이클 함수만 구현)하는 것들만 visitor패턴이라 부른다.
-
의존성 역전(DI) : 구상체를 알아야하는 애가 추상체를 알도록 바꾸는 것
- 전략패턴
-
제어 역전(IoC) : 제어구조는 미리 짜놓고, 라이프싸이클을 타는 애가 라이프싸이클함수만 구현
- visitor패턴
- 다음시간에는 컴포넌트 패턴
- 패턴을 조합해서 새로운 패턴을 만드는 것
- 대표적으로 MVC패턴 -> 옵져버 + @를 조합했는데 새로운 파워의 패턴이 나온 것